연결된 모터가 대체 입력 트리거를 통해 시계 방향 및 시계 반대 방향으로 작동 할 수 있도록하는 회로를 양방향 컨트롤러 회로라고합니다.
아래의 첫 번째 설계에서는 IC LM324의 연산 증폭기 4 개를 사용하는 풀 브리지 또는 H 브리지 기반 양방향 모터 컨트롤러 회로에 대해 설명합니다. 두 번째 기사에서는 IC 556을 사용하는 고 토크 양방향 모터 컨트롤러 회로에 대해 알아 봅니다.
소개
일반적으로, 기계식 스위치 DC 모터의 회전 방향을 조정하는 데 익숙합니다. 사용 전압과 모터의 극성을 조정하면 반대 방향으로 회전합니다!
한편으로는 전압의 극성을 변경하기 위해 DPDT 스위치를 추가해야한다는 단점이있을 수 있지만 절차를 매우 쉽게 만드는 스위치 만 다루었습니다.
그러나 DPDT에는 심각한 문제가있을 수 있지만 회전 동작 중에 DC 모터의 전압을 갑자기 반전하는 것은 권장되지 않습니다. 이로 인해 전류 스파이크가 발생하여 관련 속도 컨트롤러가 소손 될 수 있습니다.
또한 어떤 종류의 기계적 스트레스도 유사한 문제를 일으킬 수 있습니다. 이 회로는 이러한 합병증을 쉽게 극복합니다. 방향과 속도는 독방 전위차계의 도움으로 조작됩니다. 포트를 지정된 방향으로 돌리면 모터가 회전하기 시작합니다.
포트를 반대 방향으로 전환하면 모터가 역방향으로 회전 할 수 있습니다. 포트의 중간 위치는 모터를 끄고 모터가 먼저 속도를 늦춘 다음 방향을 변경하기 전에 정지하도록합니다.
기술 사양
전압 : 회로와 모터는 공통 전원을 사용합니다. 이것은 가장 높은 작동 전압이 LM324 이것은 마찬가지로 모터 작동에 접근 할 수있는 최대 전압이됩니다.
흐름: IRFZ44 MOSFET은 49A 용으로 설계되었으며 IRF4905는 74A를 처리 할 수 있습니다. 그럼에도 불구하고 MOSFET 핀에서 스크류 터미널 블록으로 연결되는 PCB 트랙은 약 5A를 관리 할 수 있습니다. 이것은 PCB 트랙 위에 구리 와이어 조각을 납땜하여 개선 할 수 있습니다.
이 경우 MOSFET이 너무 뜨거워지지 않도록해야합니다. 그렇게되면이 장치에 더 큰 히트 싱크를 장착해야합니다.
LM324 핀아웃

LM324를 사용한 DC 모터의 양방향 제어
기본적으로 다음과 같은 3 가지 방법을 찾을 수 있습니다. DC 모터의 속도 조정 :
1. 기계화 기어를 사용하여 이상적인 가속도를 얻습니다. 이 접근 방식은 종종 홈 워크샵에서 연습하는 대다수의 열성 팬의 편의를 뛰어 넘습니다.
두. 직렬 저항을 통해 모터 전압을 낮추십시오. 이것은 확실히 비효율적 일 수 있으며 (전력은 저항에서 소실 될 것입니다) 또한 토크 감소를 초래합니다.
모터가 소비하는 전류는 모터의 부하가 증가함에 따라 높아집니다. 전류가 증가하면 직렬 저항에서 더 많은 전압 강하가 발생하므로 모터의 전압이 떨어집니다.
그런 다음 모터는 더 많은 양의 전류를 끌어 당기고 모터를 정지시킵니다.
삼. 전체 공급 전압을 짧은 펄스로 모터에 적용 : 이 방법은 시리즈 드롭 효과를 제거합니다. 이를 펄스 폭 변조 (PWM)라고하며이 회로에서 발견되는 전략입니다. 빠른 펄스는 모터가 느리게 작동하도록합니다. 확장 된 펄스는 모터가 더 빠르게 작동하도록합니다.

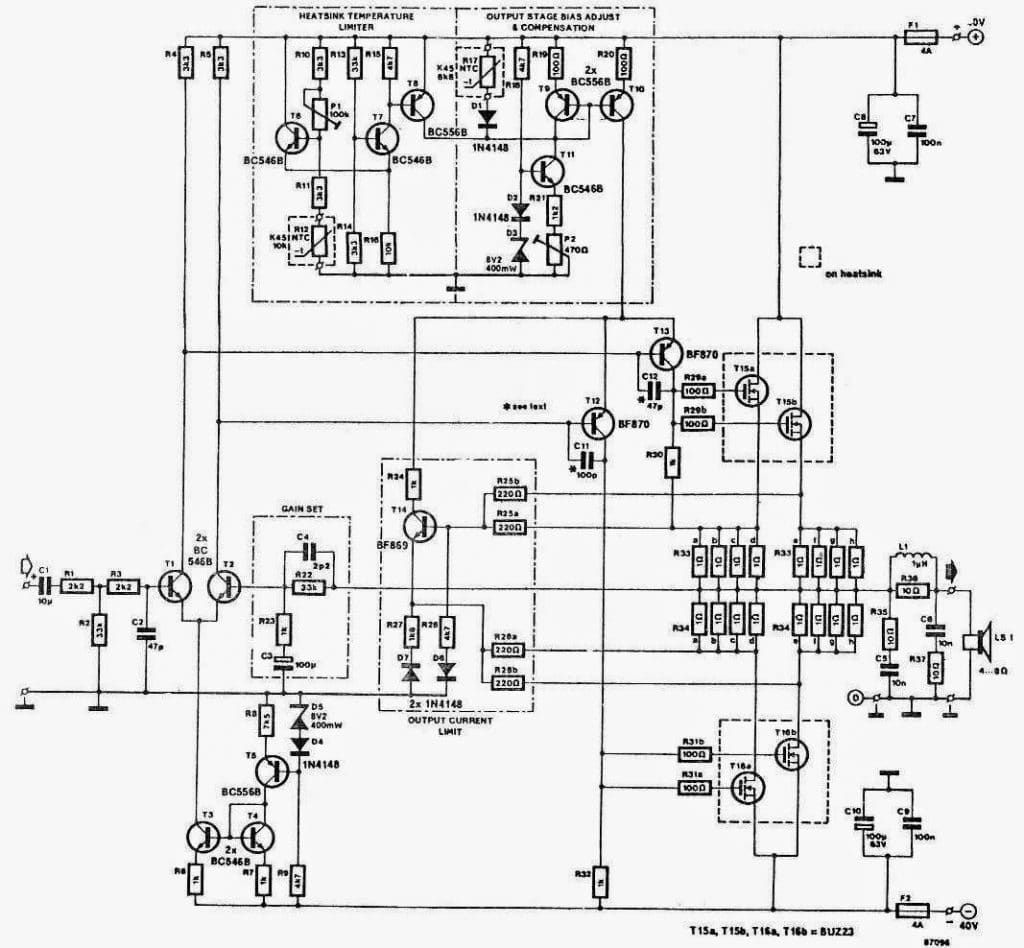
작동 방식 (개략도 참조)
회로는 네 단계로 나눌 수 있습니다.
1. 모터 제어-IC1 : A
2. 삼각파 발생기 – IC1 : B
3. 전압 비교기 – IC1 : C 및 D
4. 모터 드라이브 – Q3-6
MOSFET Q3-6을 중심으로하는 모터 드라이버 단계부터 시작하겠습니다. 이러한 MOSFET 중 몇 개만 언제든지 활성화 된 상태로 유지됩니다. Q3과 Q6이 ON 인 동안 전류는 모터를 통해 이동하여 한 방향으로 회전하게합니다.
Q4와 Q5가 작동 상태가되면 전류 순환이 역전되고 모터가 반대 방향으로 회전하기 시작합니다. IC1 : C 및 IC1 : D는 어떤 MOSFET이 켜져 있는지 처리합니다.
Opamp IC1 : C 및 IC1 : D는 전압 비교기로 배선됩니다. 이러한 opamp에 대한 기준 전압은 R6, R7 및 R8의 저항 전압 분배기에 의해 생성됩니다.
IC1 : D의 기준 전압은 '+'입력에 연결되어 있지만 IC1 : C의 경우 '-‘입력에 연결되어 있는지 확인하십시오.
즉, IC1 : D는 기준보다 높은 전압으로 활성화되는 반면 IC1 : C는 기준보다 낮은 전압으로 프롬프트됩니다. Opamp IC1 : B는 삼각파 발생기로 구성되며 활성화 신호를 관련 전압 비교기에 공급합니다.
주파수는 사용 된 값에 대해 R5 및 C1 – 270Hz의 시간 상수의 대략 역입니다.
R5 또는 C1을 줄이면 주파수가 증가하여 이들 중 하나가 주파수를 감소시킵니다. 삼각파의 피크 대 피크 출력 레벨은 두 전압 레퍼런스 간의 차이보다 훨씬 작습니다.
따라서 두 비교기가 동시에 활성화되는 것은 매우 어렵습니다. 그렇지 않으면 4 개의 MOSFET이 모두 전도되기 시작하여 단락이 발생하여 모두 망가집니다.
삼각형 파형은 DC 오프셋 전압을 중심으로 구성됩니다. 오프셋 전압을 증가 또는 감소 시키면 삼각파의 펄스 위치가 적절하게 변경됩니다.
삼각파를 위로 전환하면 비교기 IC1 : D가 활성화되고 감소하면 비교기 IC1 : C가 활성화됩니다. 삼각파의 전압 레벨이 두 전압 레퍼런스의 중간에있을 때 비교기 중 어느 것도 유도되지 않으며, DC 오프셋 전압은 전압 팔로워로 설계된 IC1 : A를 통해 전위차계 P1에 의해 조절됩니다.
이는 낮은 출력 임피던스 전압 소스를 제공하여 DC 오프셋 전압이 IC1 : B의 부하 영향에 덜 취약하도록합니다.
'포트'가 전환됨에 따라 DC 오프셋 전압은 포트가 뒤집히는 방향에 따라 위아래로 변하기 시작합니다. 다이오드 D3는 컨트롤러에 대한 역 극성 보호 기능을 제공합니다.
저항 R15와 커패시터 C2는 단순한 저역 통과 필터입니다. 이는 MOSFET이 모터에 전원을 공급할 때 발생하는 전압 스파이크를 제거하기위한 것입니다.
부품 목록

2) IC 556을 이용한 양방향 모터 제어
DC 모터의 속도 및 양방향 제어는 구현하기가 비교적 간단합니다. 독립적으로 전원이 공급되는 모터의 경우 속도는 원칙적으로 공급 전압의 선형 함수입니다. 영구 자석이있는 모터는 독립적으로 전원이 공급되는 모터의 하위 범주이며 장난감 및 모델에 자주 사용됩니다.
이 회로에서 모터 공급 전압은 펄스 폭 변조 (PWM)를 통해 변합니다. 이는 낮은 모터 속도에서 상대적으로 높은 토크뿐 아니라 우수한 효율성을 보장합니다. 0에서 + 10V 사이의 단일 제어 전압은 모터 속도를 반전시키고 양방향에서 최대 값에서 최대 값까지 변경할 수 있습니다.
불안정한 멀티 바이브레이터 IC는 80Hz 발진기로 설정되며 PWM 신호의 주파수를 결정합니다. 전류 소스 T1은 Ca를 충전합니다. 이 커패시터의 톱니 전압은 PWM 신호를 버퍼 N1-Na 또는 NPN1로 출력하는 1C2의 제어 전압과 비교됩니다. Darlington 기반 모터 드라이버는 런인 전류가 5A 미만으로 유지되고 전력 트랜지스터 T1-T에 충분한 냉각이 제공되는 경우 최대 4A의 부하를 구동 할 수있는 브리지 회로입니다. 다이오드 D1, D5는 모터 스위치 S1의 유도 성 서지에 대한 보호 기능을 제공하므로 모터 방향을 즉시 반전 할 수 있습니다.

프로토 타입 이미지



Previous : 증폭기 회로 이해 Next : Arduino를 사용하여 트랜지스터 (BJT) 및 MOSFET을 연결하는 방법