이 게시물에서는 단상 유도 전동기 또는 말 그대로 모든 유형의 AC 전동기에 적용 할 수있는 간단한 3 상 유도 전동기 속도 컨트롤러 회로의 제작에 대해 설명합니다.
때에 온다 유도 전동기의 속도 제어 , LC 필터, 양방향 스위치 어레이 (IGBT 사용) 등과 같은 많은 복잡한 단계를 포함하는 일반적으로 매트릭스 컨버터가 사용됩니다.
이 모든 것은 복잡한 마이크로 컨트롤러 회로를 사용하여 듀티 사이클을 조정할 수있는 절단 된 AC 신호를 궁극적으로 달성하기 위해 사용되어 최종적으로 필요한 모터 속도 제어를 제공합니다.
그러나 우리는 고급 제로 크로싱 검출기 옵토 커플러 IC, 전력 트라이 액 및 PWM 회로를 사용하여 훨씬 더 간단한 개념을 통해 3 상 유도 모터 속도 제어를 실험하고 달성하려고 시도 할 수 있습니다.
제로 크로싱 검출기 옵토 커플러 사용
트라이 악 제어 회로를 매우 안전하고 쉽게 구성 할 수있게하고 의도 한 제어를 위해 번거롭지 않은 PWM 통합을 허용하는 MOC 광 커플러 시리즈 덕분입니다.
이전 게시물 중 하나에서 간단한 PWM 소프트 스타트 모터 컨트롤러 회로 연결된 모터에서 효과적인 소프트 스타트를 제공하기 위해 MOC3063 IC를 구현했습니다.
여기에서도 제안 된 3 상 유도 전동기 속도 컨트롤러 회로를 적용하기 위해 동일한 방법을 사용합니다. 다음 이미지는 이것이 수행되는 방법을 보여줍니다.
그림에서 표준 트라이 액 레귤레이터 모드로 구성된 3 개의 동일한 MOC 옵토 커플러 단계와 입력 측이 간단한 IC 555 PWM 회로 .
3 개의 MOC 회로는 3 상 AC 입력을 처리하고 부착 된 유도 모터에 동일하게 전달하도록 구성됩니다.
옵토의 절연 LED 제어 측에있는 PWM 입력은 MOC ICS에 의해 처리되는 3 상 AC 입력의 초핑 비율을 결정합니다.
IC 555 PWM 컨트롤러 사용 (제로 전압 스위칭)
즉, 조정함으로써 555 IC와 관련된 PWM 포트 유도 전동기의 속도를 효과적으로 제어 할 수 있습니다.
핀 # 3의 출력은 다양한 듀티 사이클과 함께 제공되며 이에 따라 출력 트라이 액이 전환되어 AC RMS 값이 증가하거나 감소합니다.
더 넓은 PWM을 통해 RMS를 높이면 모터에서 더 높은 속도를 얻을 수 있고, 더 좁은 PWM을 통해 AC RMS를 낮추면 반대 효과가 발생합니다. 즉, 모터가 비례 적으로 느려지 게됩니다.
위의 기능은 IC에 많은 내부 정교한 기능이 할당되어 있기 때문에 많은 정밀도와 안전성으로 구현됩니다. 트라이 악 및 무거운 유도 부하 구동 인덕션 모터, 솔레노이드, 밸브, 접촉기, 솔리드 스테이트 릴레이 등
또한 IC는 DC 스테이지에 대해 완벽하게 격리 된 작동을 보장하므로 사용자가 감전의 두려움없이 조정할 수 있습니다.
이 원리는 3 대신 단일 MOC IC를 사용하여 단상 모터 속도를 제어하는 데에도 효율적으로 사용할 수 있습니다.
디자인은 실제로 시간 비례 트라이 액 드라이브 이론. 상위 IC555 PWM 회로는 훨씬 더 높은 주파수에서 50 % 듀티 사이클을 생성하도록 조정될 수 있으며, 하위 PWM 회로는 관련 포트의 조정을 통해 유도 전동기의 속도 제어 작동을 구현하는 데 사용될 수 있습니다.
이 555 IC는 상위 IC 555 회로보다 상대적으로 낮은 주파수를 갖는 것이 좋습니다. 이것은 pin # 6 / 2 커패시터를 약 100nF로 증가시킴으로써 수행 될 수 있습니다.

참고 : 위상 전선과 함께 직렬로 적합한 인덕터를 추가하면 시스템의 속도 제어 성능을 크게 향상시킬 수 있습니다.
위의 개념을 사용하여 가정 된 파형 및 위상 제어 :

위에서 설명한 3 상 유도 전동기를 제어하는 방법은 실제로 매우 조잡합니다. V / Hz 제어 없음 .
단순히 전원을 다른 속도로 ON / OFF 전환하여 모터에 평균 전력을 생성하고이 평균 AC를 모터로 변경하여 속도를 제어합니다.
모터를 수동으로 40 회 또는 분당 50 회 ON / OFF한다고 상상해보십시오. 그러면 모터가 상대적인 평균 값으로 느려지지만 계속해서 움직입니다. 위의 원칙은 같은 방식으로 작동합니다.
보다 기술적 접근 방식은 V / Hz 비율의 적절한 제어를 보장하고 슬립 속도 또는 전압 변동에 따라 자동으로 동일하게 조정되는 회로를 설계하는 것입니다.
이를 위해 기본적으로 다음 단계를 사용합니다.
- H- 브리지 또는 풀 브리지 IGBT 드라이버 회로
- 풀 브리지 회로 공급을위한 3 상 발전기 스테이지
- V / Hz PWM 프로세서
풀 브리지 IGBT 제어 회로 사용
위의 트라이 악 기반 설계의 설정 절차가 어려울 경우 다음과 같은 풀 브리지 PWM 기반 유도 전동기 속도 제어를 시도 할 수 있습니다.

위 그림에 표시된 회로는 단일 칩 풀 브리지 드라이버를 사용합니다. IC IRS2330 (최신 버전은 6EDL04I06NT) 안전하고 완벽한 3 상 모터 작동을 만족시키기 위해 모든 기능이 내장되어 있습니다.
IC는 필요한 3 상 발진 출력을 생성하기 위해 HIN / LIN 핀아웃에 동기화 된 3 상 로직 입력 만 있으면되며, 이는 마지막으로 풀 브리지 IGBT 네트워크 및 연결된 3 상 모터를 작동하는 데 사용됩니다.
그만큼 속도 제어 PWM 주입 이전 설계에서 볼 수 있듯이 IC 555 PWM 발생기의 SPWM 피드로 제어되는 3 개의 개별 하프 브리지 NPN / PNP 드라이버 단계를 통해 구현됩니다. 이 PWM 레벨은 궁극적으로 유도 전동기의 속도를 제어하는 데 사용될 수 있습니다.
유도 전동기의 실제 속도 제어 방법을 배우기 전에 먼저 자동 V / Hz 제어 아래에 설명 된대로 몇 개의 IC 555 회로를 사용하여 달성 할 수 있습니다.
자동 V / Hz PWM 프로세서 회로 (폐쇄 루프)
위의 섹션에서 우리는 유도 모터가 제조업체가 지정한 속도로 움직이는 데 도움이되는 설계를 배웠지 만 다음 PWM 프로세서가 H와 통합되지 않는 한 일정한 V / Hz 비율에 따라 조정되지 않습니다. -브리지 PWM 입력 피드.

위의 회로는 간단합니다 두 개의 IC 555를 사용하는 PWM 발생기 . IC1은 R4 / C3의 도움으로 IC2의 6 번 핀에서 삼각파로 변환되는 PWM 주파수를 생성합니다.
이 삼각파는 IC2의 5 번 핀에서 사인파 리플과 비교됩니다. 이러한 샘플 리플은 3 상 AC 주전원을 12V AC 리플로 정류하여 수집되며 필요한 처리를 위해 IC2의 5 번 핀에 공급됩니다.
두 파형을 비교하여 적절한 치수를 SPWM이 생성됨 IC2의 3 번 핀에서 H 브리지 네트워크의 구동 PWM이됩니다.
V / Hz 회로의 작동 방식
전원이 켜지면 핀 # 5의 커패시터는 핀 # 5에서 제로 전압을 렌더링하여 시작하여 가장 낮은 SPWM 값을 H 브리지 회로 , 차례로 유도 전동기가 천천히 점진적인 소프트 스타트로 시작할 수 있습니다.
이 커패시터가 충전되면 핀 # 5의 전위가 상승하여 SPWM을 비례 적으로 높이고 모터가 점차적으로 속도를 얻을 수 있도록합니다.
또한 IC2의 5 번 핀과 통합 된 회전 속도계 피드백 회로도 볼 수 있습니다.
이 유속계 로터 속도 또는 슬립 속도를 모니터링하고 IC2의 5 번 핀에서 추가 전압을 생성합니다.
이제 모터 속도가 증가함에 따라 슬립 속도가 고정자 주파수와 동기화를 시도하고 그 과정에서 속도를 얻기 시작합니다.
인덕션 슬립의 이러한 증가는 타코미터 전압을 비례 적으로 증가시켜 IC2가 SPWM 출력 이것은 차례로 모터 속도를 더욱 증가시킵니다.
위의 조정은 IC2의 SPWM이 더 이상 증가 할 수 없을 때까지 V / Hz 비율을 상당히 일정한 수준으로 유지하려고합니다.
이 시점에서 슬립 속도와 고정자 속도는 정상 상태를 얻고 입력 전압 또는 슬립 속도 (부하로 인한)가 변경되지 않을 때까지 유지됩니다. 이것이 변경되는 경우 V / Hz 프로세서 회로가 다시 작동하고 유도 전동기 속도의 최적 응답을 유지하기위한 비율 조정을 시작합니다.
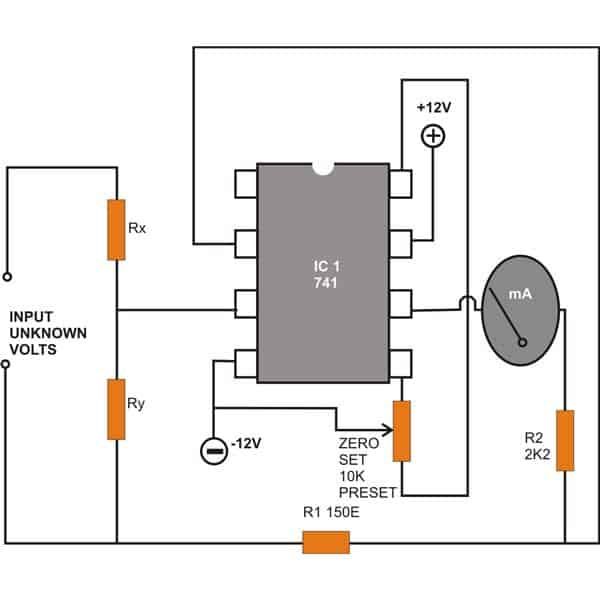
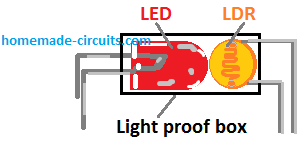
타코미터
그만큼 타코미터 회로 다음과 같은 간단한 회로를 사용하여 저렴하게 구축하고 위에서 설명한 회로 단계와 통합 할 수도 있습니다.

속도 제어를 구현하는 방법
위의 단락에서 우리는 통합을 통해 달성 할 수있는 자동 규제 프로세스를 이해했습니다. 타코미터 피드백 자동 조절 SPWM 컨트롤러 회로에 연결합니다.
이제 주파수를 변경하여 유도 전동기의 속도를 제어하여 궁극적으로 SPWM이 올바른 V / Hz 비율을 떨어 뜨리고 유지하도록하는 방법에 대해 알아 보겠습니다.
다음 다이어그램은 속도 제어 단계를 설명합니다.

여기에서 핀 # 6의 클록 입력을 변경하여 위상 편이 주파수를 변경할 수있는 IC 4035를 사용하는 3 상 발생기 회로를 볼 수 있습니다.
3 상 신호는 풀 브리지 드라이버 네트워크에 필요한 HIN, LIN 피드를 생성하기 위해 4049 IC 게이트에 적용됩니다.
이는 IC 4035의 클럭 주파수를 적절하게 변경함으로써 유도 전동기의 작동 3 상 주파수를 효과적으로 변경할 수 있음을 의미합니다.
이는 IC 4035의 6 번 핀에서 가변 주파수를 공급하는 간단한 IC 555 불안정 회로를 통해 구현되며, 부착 된 100K 포트를 통해 주파수를 조정할 수 있습니다. 커패시터 C는 조정 가능한 주파수 범위가 연결된 유도 전동기의 올바른 사양에 포함되도록 계산되어야합니다.
주파수 포트가 변경되면 유도 전동기의 유효 주파수도 변경되어 이에 따라 모터 속도가 변경됩니다.
예를 들어 주파수가 감소하면 모터 속도가 감소하여 회전 속도계 출력이 비례 적으로 전압을 감소시킵니다.
타코미터 출력의 이러한 비례적인 감소는 SPWM이 좁아 지도록하여 모터로의 전압 출력을 비례 적으로 끌어 내립니다.
이 동작은 주파수 제어를 통해 유도 전동기 속도를 제어하면서 V / Hz 비율이 유지되도록합니다.
경고 : 위의 개념은 이론적 인 가정으로 만 설계되었으므로주의해서 진행하십시오.
이 3 상 유도 전동기 속도 컨트롤러 설계에 대해 더 궁금한 점이 있으면 의견을 통해 동일한 내용을 게시 할 수 있습니다.
Previous : 무정전 전원 공급 장치 (UPS) 회로를 설계하는 방법 다음 : IC 555를 사용하여 두 개의 대체 부하 켜기 / 끄기






![24V ~ 12V DC 컨버터 회로 [스위칭 레귤레이터 사용]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)