이 포스트에서는 아두 이노 자동 가로등 조광기 회로를 구성 할 것입니다.이 회로는 전기를 절약하기 위해 도로를 지나가는 차량이 없을 때 밝기를 낮출 수 있습니다.
으로
개요
우리는 동물로 인해 발생할 수있는 오 탐지없이 차량이나 인간을 감지하는 방법론과 에너지 낭비없이 빛을 어둡게하는 프로토콜을 탐구 할 것입니다.
가로등은 차량이 도로를 따라 안내하는 데 도움이되지만 늦은 밤 시간에는 대부분의 도로가 비어 있고 여전히 모든 가로등이 아침까지 켜집니다.
도로가 비어 있어도 밤새 가로등이 켜지 기 때문에 가로등을 켜는 것은 가치가 없으며 에너지 소비로 인한 비용은 지자체에 직접적인 영향을 미칩니다.
이 문제를 현명하게 극복하기 위해 가로등의 밝기를 원하는 수준으로 낮추고 차량이나 사람이 지나갈 때만 최대 밝기로 밝힐 수 있습니다.
이것은 정부가 전력 지출을 줄이는 데 도움이 될 수 있으며 다른 에너지 수요 목적으로 사용될 수있는 많은 에너지를 절약 할 수도 있습니다.
도로에서 활동을 감지하기 위해 제안 된 아이디어는 센서와 장애물 사이의 거리를 측정 할 수있는 초음파 센서를 사용합니다.이 경우 장애물은 차량 또는 사람입니다.
차량이 센서 범위에 들어 오면 차량과 센서 사이의 거리를 결정하기 위해 몇 가지 수학적 계산을 수행합니다. 차량이 미리 결정된 범위 미만으로 확인되면 온보드 마이크로 컨트롤러가 가로등을 켭니다. 최대 밝기.
가로등은 미리 정해진 시간 동안 최대 밝기로 조명되며 차량이나 사람이 더 이상 감지되지 않으면 밝기가 감소합니다.
지금 쯤이면이 프로젝트의 목적은 분명해 졌을 것입니다. 제안 된 설정의 회로를 살펴 보겠습니다.
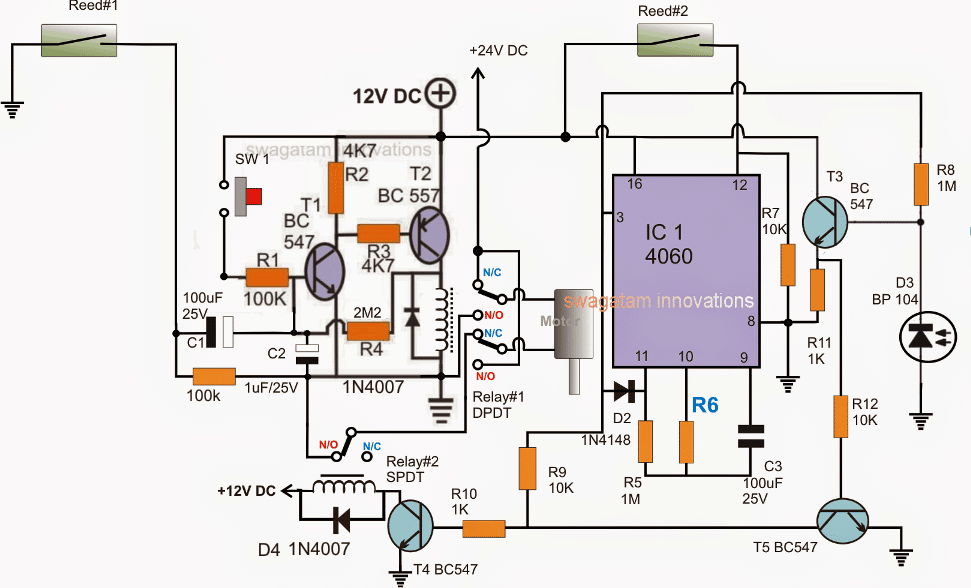
회로 작동

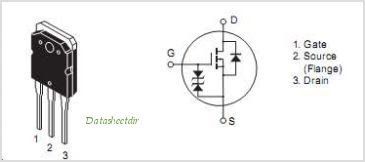
자동 가로등 조광기 회로는 프로젝트의 두뇌 인 아두 이노와 차량이나 사람을 감지하는 초음파 센서로 구성됩니다. arduino 마이크로 컨트롤러 보드에 전원을 공급하기위한 9V 레귤레이터와 피크 밝기에서 몇 암페어를 소비하는 LED를 구동하기위한 MOSFET이 제공됩니다.
설정을위한 LED 모듈 및 전원 공급 장치는 전체 회로에 사용할 수있는 적절한 전원이 있고 전원 공급 장치에 과부하가 걸리지 않도록 신중하게 선택해야합니다.
LED 모듈은 회로도에 표시된 수제 모듈이거나 시장 용으로 구입할 수 있지만 하나의 형태로 시장을 구성하거나 확보하기 전에 전원 공급 장치에 대한 전압 및 전류 요구 사항을 계산해야합니다.
전원 공급 장치는 SMPS이거나 변압기, 정류기 및 전압 조정기를 사용하여 구성 될 수 있습니다.
LED는 PWM을 사용하여 밝기를 줄입니다. PWM은 구형파이며 단일 사이클에서 잘 결정된 온 / 오프 폭으로 LED에 빠르게 공급을 켜고 끕니다. 켜짐 및 꺼짐 시간의 폭이 LED의 밝기를 결정합니다.
가로등이 최대 밝기로 전환되면 LED에 대한 공급에는 펄스가없고 안정적인 DC가 공급됩니다.
전체 설정은 아래와 같이 구현할 수 있습니다.
설정 다이어그램
 -
-
초음파 센서는 지상에서 약 3.5 피트에서 4 피트까지 올라갑니다. 이것은 평균 높이가 거의 같고 개나 고양이 또는 일반적으로 도시를 돌아 다니는 다른 동물이있을 때 차량과 인간 만 감지하도록 수행됩니다. 가로등을 최대 밝기로 트리거하지 마십시오.
도시 주변을 돌아 다니는 동물은 키가 3.5 피트 미만입니다.
센서 높이는 위의 그림과 같이 최적의 수준으로 작동하도록 조정할 수 있습니다.
임계 거리는 프로그램에서 제어 할 수 있습니다.
Arduino가 미리 정해진 거리 아래에서 감지 된 장애물을 감지하면 LED 조명이 최대 밝기로 이동합니다.
“단상 대 3상 배선 ”
프로그램 코드 :
//--------------------Program developed by R.Girish-------------------//
const int trigger = A1
const int echo = A2
int vcc = A0
int gnd = A3
int LED = 3
long Time
float distanceCM
float distanceM
float distance = 100 // set threshold distance in cm
int dim = 28 // adjust minimum brightness
int bright = 255 // adjust maximum brightness
float resultCM
float resultM
void setup()
{
pinMode(LED,OUTPUT)
pinMode(trigger,OUTPUT)
pinMode(echo,INPUT)
pinMode(vcc,OUTPUT)
pinMode(gnd,OUTPUT)
Serial.begin(9600)
}
void loop()
{
digitalWrite(vcc,HIGH)
digitalWrite(gnd,LOW)
digitalWrite(trigger,LOW)
delay(1)
digitalWrite(trigger,HIGH)
delayMicroseconds(10)
digitalWrite(trigger,LOW)
Time=pulseIn(echo,HIGH)
distanceCM=Time*0.034
resultCM=distanceCM/2
resultM=resultCM/100
Serial.print('Distance in cm: ')
Serial.println(resultCM)
Serial.print('Distance in meter: ')
Serial.println(resultM)
Serial.println('------------------------------------------')
if(resultCM<=distance)
{
analogWrite(LED, bright)
delay(10000)
}
if(resultCM>=distance)
{
analogWrite(LED,dim)
}
delay(100)
}
//-----------------Program developed by R.Girish-------------------//
노트:
• 임계 값 거리는 값을 자신의 것으로 대체하여 조정할 수 있습니다.
float distance = 100 // 임계 거리를 cm 단위로 설정
값은 센티미터 단위로 입력해야하며 최대 값은 400 ~ 500cm 또는 4 ~ 5m입니다.
• 조명의 디밍은 다음을 사용하여 조정할 수 있습니다.
int dim = 28 // 최소 밝기 조정
255는 최대 밝기 0은 소등입니다.
센서와 장애물 사이의 거리를 직렬 모니터에서도 확인할 수 있습니다.

이 Arduino 기반 자동 가로등 조광기 회로에 대한 추가 질문이 있으면 의견 섹션에서 자유롭게 질문하십시오.
이전 : 실험실 및 상점 용 인덕션 히터 다음 : 타이머 제어 피트니스 체육관 애플리케이션 회로