인덕터는 커패시터의 반대라고 상상할 수 있습니다. 커패시터와 인덕터의 주요 차이점은 커패시터가 플레이트 사이에 보호 유전체를 전달하여 단자에서 전류의 전도를 억제한다는 것입니다. 여기서는 개방 회로처럼 작동합니다.
반면 인덕터의 인덕턴스는 일반적으로 (항상은 아니지만) 저항이 매우 낮거나 최소입니다. 본질적으로 폐쇄 회로처럼 작동합니다.
커패시터 인덕터 이중성
회로의 두 매개 변수 또는 회로의 일부 사이에 이러한 유형의 관계에 대해 전자 공학에는 고유 한 용어가 있습니다. 이 유형의 쌍 요소는 다음과 같이 알려져 있습니다. 서로의 이중 . 예를 들어, 전류를 전도하는 능력에 따라 개방 회로는 폐쇄 회로의 이중 회로입니다.
동일한 원리로 인덕터는 커패시터의 이중입니다. 인덕터와 커패시터의 이중성은 단순히 전류를 전도하는 자연 용량보다 훨씬 깊습니다.
이 기사에서는 인덕터와 커패시터의 작동 원리를 비교하고 계산과 공식으로 결과를 평가합니다.
인덕터는 일반적으로 전자 회로에서 거의 볼 수 없다는 사실에도 불구하고 오늘날 대부분 활성 필터의 연산 증폭기로 대체되기 때문에 회로에 관련된 다른 부분은 일정량의 인덕턴스를 전달하는 것처럼 보입니다.
커패시터 또는 저항기 단자의 자체 인덕턴스는 고주파 회로에서 큰 문제가되며, 이는 무연 표면 실장 저항기 및 커패시터가 이러한 애플리케이션에 자주 사용되는 이유를 설명합니다.
기본 커패시터 방정식
커패시터의 기본 방정식은 패러 드가 정의되는 방정식입니다.
C = Q / I [Eq.19]
여기서 C는 패러 드 단위의 커패시턴스, Q는 쿨롱 단위의 전하, U는 볼트 단위의 플레이트 사이의 pd입니다.
Eq를 통해. 19에서 우리는 Q = ∫ I dt + c 형식의 공식을 얻습니다. 여기서 c는 가능한 경우 초기 충전입니다. Q를 확인하면 식에서 U를 결정할 수 있습니다. 19 :
U = 1 / C ∫ I dt + c / C [수식 21]
커패시터의 중요한 특성은주기적인 전류 (일반적으로 정현파로 진동하는 전류)가 적용되면 커패시터의 전하와 그 양단의 전압도 정현파로 변동합니다.
전하 또는 전압 곡선은 음의 코사인 곡선이거나 전류 곡선보다 뒤쳐지는 사인 곡선으로 상상할 수 있습니다. 파이 / 2 작동 (90 °).
인덕턴스의 단위 인 헨리를 정의하는 기본 방정식은 다음과 같습니다.
L = NΦ / 나 [수식 22]
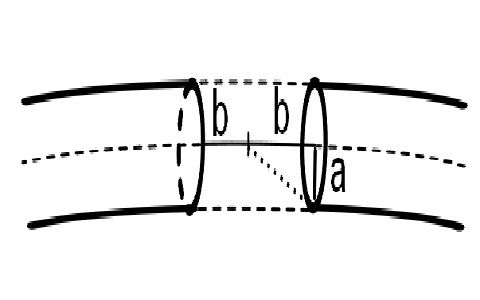
단일 코일을 참조하면 헨리의 자기 인덕턴스는 플럭스 관계 (자기 플럭스<1) in weber multiplied by the number of winding N, (because the magnetic flux cuts through each turn), when a unit current passes through it (I = 1 A). An even more handy definition could be extracted from Eq. 22, using Neumann’s equation. This claims that:
U = N (dΦ / dt) [수식 23]
이 방정식이 암시하는 것은 e.m.f. 인덕터 내에서 유도되는 것은 플럭스의 연결된 변화율에 상대적입니다.
플럭스가 더 빨리 변할수록 유도 된 e.m.f. 예를 들어 인덕터 또는 코일의 자속이 2mWb s의 속도로 상승 할 때-1, 코일이 25 회 회전한다고 가정하면 U = 25x2 = 50V입니다.
e.m.f.의 경로 Lenz의 법칙에 명시된대로 유동의 변화에 저항합니다.
이 진실은 방정식의 오른쪽 앞에 빼기 기호를 붙여서 종종 지적하지만, U가 뒤쪽 e.m.f.라고 믿는 한 기호는 제거 될 수 있습니다.
차이
Eq에서 용어 dΦ / dt. 23은 플럭스의 변화율로 우리가 배운 것을 나타냅니다. 이 구는 t에 대한 Φ의 미분이라고 불리며 산술의 전체 분기는 이러한 종류의 표현을 사용하는 데 전념합니다. 이 문구는 하나 이상의 수량 (dt)으로 나눈 단일 숫자 (dΦ)의 형태를가집니다.
미분은 다양한 비율 집합을 연결하는 데 사용됩니다. 예를 들어 dy / dx는 변수 x와 y를 결합합니다. 가로 축을 가로 질러 x 값을 사용하고 세로 축을 가로 질러 y 값을 사용하여 그래프를 그릴 때 dy / dx는 그래프의 기울기 또는 기울기가 얼마나 가파른지를 나타냅니다.
U가 FET 게이트-소스 전압이고 여기서 T는 관련 드레인 전류 인 경우, dI / dU는 주어진 U 변화에 대해 I가 변경되는 양을 나타냅니다. 또는 dI / dU가 트랜스 컨덕턴스라고 말할 수 있습니다. 인덕터를 논의하는 동안 dΦ / dt는 시간에 따른 플럭스의 변화율이 될 수 있습니다.
미분을 계산하는 것은 적분의 역 절차로 간주 할 수 있습니다. 이 기사에는 미분 이론을 살펴볼 충분한 여지가 없지만, 일반적으로 사용되는 양과 그 미분에 대한 표를 정의 할 것입니다.
표준 차동

위의 표는 루틴 x 및 y 대신 I 및 t를 요인으로 사용하여 작동합니다. 따라서 세부 사항은 특히 전자 제품과 관련이 있습니다.
예를 들어, I = 3t +2를 고려하면 시간에 따른 I 편차를 그림 38의 그래프로 시각화 할 수 있습니다. I의 변화율을 확인하려면 다음과 같이 dI / dt를 추정합니다. 표를 참조하십시오.

함수의 첫 번째 요소는 3t 또는 표의 첫 번째 줄로 형식화하려면 3t입니다.1. n = 1이면 미분은 3t입니다.1-1= 3t0.
t 이후0= 1, 미분은 3입니다.
두 번째 수량은 2이며 2t로 표현할 수 있습니다.0.
이것은 n = 0을 변경하고 미분의 크기는 0입니다. 상수의 미분은 항상 0입니다. 이 두 가지를 결합하면 다음과 같은 이점이 있습니다.
dI / dt = 3
이 그림에서 미분에는 t가 포함되어 있지 않습니다. 즉, 미분은 시간에 의존하지 않습니다.
간단히 말해, 그림 38의 곡선의 기울기 또는 기울기는 항상 3입니다. 아래 그림 39는 다른 함수 I = 4 sin 1.5t에 대한 곡선을 보여줍니다.

표를 참조하면이 함수에서 α = 1.5 및 b = 0입니다. 표는 dl / dt = 4x1.5cos1.5t = 6cos 1.5t를 보여줍니다.
이는 I의 순간 변화율을 알려줍니다. 예를 들어 t = 0.4, dI / dt = 6cos0.6 = 4.95입니다. 이것은 6 cos0.6t의 곡선이 t = 0.4 일 때 4.95 값을 포함하는 그림 39에서 알 수 있습니다.
또한 곡선 4sin1.5t의 기울기는 t = 0.4 일 때 4.95라는 것을 관찰 할 수 있습니다 (두 축의 서로 다른 축척에 대해).
t = π / 3 일 때 전류가 가장 높고 일정한 지점,이 경우 dI / dt = 6cos (1.5xπ / 3) : 0, 전류의 제로 변화에 해당합니다.
반대로 t = 2π / 3이고 전류가 가능한 가장 높은 수준에서 양의 값에서 음의 값으로 전환 될 때, dI / dt = 6cosπ = -6이면 가장 높은 음의 값이 표시되어 전류가 크게 감소합니다.
미분의 간단한 이점은 곡선을 그릴 필요없이 I = 4sin 1.5t에 비해 훨씬 더 복잡한 함수에 대한 변화율을 결정할 수 있다는 것입니다.
계산으로 돌아 가기
Eq 22의 용어를 재구성하면 다음을 얻을 수 있습니다.
Φ = (L / N) 나 [수식 24]
L과 N은 일정한 차원을 가지고 있지만 Φ와 I는 시간에 대한 값을 가질 수 있습니다.
시간과 관련하여 방정식의 두 변을 미분하면 다음과 같은 결과를 얻을 수 있습니다.
dΦ / dt = (L / N) (dI / dt) [식. 25]
이 방정식을 Eq.23과 병합하면 다음이 제공됩니다.
U = N (L / N) (dI / dt) = L (dI / dt) [수식 26]
이것은 표현하는 또 다른 방법입니다 헨리 . 자기 인덕턴스가 1H이고 전류의 변화가 1As 인 코일이라고 말할 수 있습니다.-1다시 e.m.f를 생성합니다. 전류가 시간에 따라 어떻게 변하는 지 정의하는 함수가 주어지면 Eq. 26은 우리가 다시 e.m.f를 계산하십시오. 어떤 순간에 인덕터의.
다음은 몇 가지 예입니다.
A) I = 3 (3A의 정전류) dl / dt = 0. 전류의 변화를 찾을 수 없으므로 다시 e.m.f. 0입니다.
B) I = 2t (램프 전류) dI / dt = 2As-1. L = 0.25 H를 전달하는 코일의 경우 후면 e.m.f. 0.25x2 = 0.5V에서 일정합니다.
C) I = 4sin1.5t (이전 그림에 제공된 정현파 전류 dl / dt = 6cos 1.5t. L = 0.1 H 인 코일이 주어지면 순간 역기전력은 0.6cos1.5t입니다. 역기전력은 차동 곡선을 따릅니다. 그러나 진폭은 6A가 아닌 0.6V입니다.
'듀얼'이해
다음 두 방정식은 각각 커패시터와 인덕터의 방정식을 나타냅니다.

특정 기능에 따라 시간에 따라 변하는 전류를 통해 구성 요소에서 생성되는 전압 수준을 결정하는 데 도움이됩니다.
다음으로 얻은 결과를 평가 해 보겠습니다. 차별화 시간에 대한 Eq.21의 L 측과 H 측.
dU / dt = (1 / C) 나
미분은 적분의 역이라는 것을 알고 있듯이, ∫I dt의 미분은 적분을 역전시키고 결과는 I뿐입니다.
c / C를 미분하면 0이되고 항을 다시 정렬하면 다음이 생성됩니다.
나는 = C.dU / dt [수식 27]
이를 통해 주어진 기능에 따라 달라지는 전압에 응답하여 전류가 커패시터로 향하는 지 또는 커패시터에서 나오는지 여부를 알 수 있습니다.
흥미로운 점은 위의 커패시터 전류 방정식 인덕터의 전압 방정식 (26)과 비슷해 보입니다. 커패시턴스, 인덕턴스 이중성.
유사하게, 전류와 전위차 (pd) 또는 전류와 pd의 변화율은 커패시터와 인덕터에 적용될 때 이중이 될 수 있습니다.
이제 quatret 방정식을 완료하기 위해 시간에 대해 Eq.26을 통합 해 보겠습니다.
∫ U dt + c = LI
dI / dt의 적분은 = I입니다. 표현식을 재정렬하여 다음을 얻습니다.
I = 1 / L∫ U dt + e / L
이것은 다시 Eq.21과 매우 유사하게 보이며 커패시턴스와 인덕턴스, 그리고 그들의 pd와 전류의 이중 특성을 더욱 입증합니다.
이제 커패시터 및 인덕터 관련 문제를 해결하는 데 사용할 수있는 네 가지 방정식 세트가 있습니다.
예제 Eq.27을 적용하여 다음과 같이 문제를 해결할 수 있습니다.
문제: 100uF에 걸쳐인가 된 전압 펄스는 아래 그림과 같이 곡선을 생성합니다.

이는 다음과 같은 조각 별 함수를 사용하여 정의 할 수 있습니다.

커패시터를 통해 이동하는 전류를 계산하고 해당 그래프를 플로팅합니다.
해결책:
첫 번째 단계에서는 Eq.27을 적용합니다.
나는 = C (dU / dt) = 0
U가 일정한 비율로 상승 할 수있는 두 번째 경우 :
나는 = C (dU / dt) = 3C = 300μA
이것은 일정한 충전 전류를 보여줍니다.
U가 기하 급수적으로 떨어지는 세 번째 단계의 경우 :

이것은 기하 급수적으로 감소하는 속도로 커패시터에서 멀리 흐르는 전류를 나타냅니다.
위상 관계

abobe 그림에서 교류 pd가 인덕터에 적용됩니다. 이 pd는 언제든지 다음과 같이 표현할 수 있습니다.

여기서 Uo는 pd의 피크 값입니다. 루프 형태로 회로를 분석하고 Kirchhoff의 전압 법칙을 시계 방향으로 적용하면 다음과 같은 결과를 얻을 수 있습니다.

그러나 여기에서 전류는 정현파이므로 괄호 안의 항은 피크 전류 Io와 동일한 값을 가져야하므로 최종적으로 다음을 얻습니다.

Eq.29와 Eq.30을 비교하면 전류 I와 전압 U가 동일한 주파수를 가지며 I가 U보다 뒤쳐진다는 것을 알 수 있습니다. π / 2.
결과 곡선은 다음 다이어그램의 연구가 될 수 있습니다.

씨
이것은 커패시터와 인덕터 사이의 대조적 인 관계를 보여줍니다. 인덕터 전류의 경우 전위차가 π / 2만큼 지연되고 커패시터의 경우 전류가 pd보다 앞선다. 이것은 다시 두 구성 요소의 이중 특성을 보여줍니다.
Previous : 27MHz 송신기 회로 – 10Km 범위 다음 : H- 브리지 부트 스트랩