제시된 3 상 VFD 회로 ( 내가 디자인 한 )는 3 상 브러시 드 AC 모터 또는 브러시리스 AC 모터의 속도를 제어하는 데 사용할 수 있습니다. 이 아이디어는 Mr. Tom이 요청했습니다.
VFD 사용
제안 된 3 상 VFD 회로는 조절 효율이 너무 중요하지 않은 대부분의 3 상 AC 모터에 보편적으로 적용될 수 있습니다.
그것은 통제를 위해 특별히 사용될 수 있습니다 다람쥐 케이지 유도 전동기 속도 개 루프 모드로, 그리고 아마도 기사의 뒷부분에서 논의 될 폐 루프 모드에서도 가능합니다.
3 상 인버터에 필요한 모듈
제안 된 3 상 VFD 또는 가변 주파수 드라이브 회로를 설계하려면 다음과 같은 기본 회로 단계가 필수적으로 필요합니다.
- PWM 전압 컨트롤러 회로
- 3 상 하이 사이드 / 로우 사이드 H 브리지 드라이버 회로
- 3 상 발생기 회로
- V / Hz 매개 변수 생성을위한 전압-주파수 변환기 회로.
다음 설명을 통해 위 단계의 기능 세부 정보를 알아 보겠습니다.
아래 다이어그램에서 간단한 PWM 전압 컨트롤러 회로를 확인할 수 있습니다.

PWM 컨트롤러
나는 이미 동일한 IC의 pin5에 적용된 전위에 응답하여 IC2의 pin3에 걸쳐 다양한 PWM 출력을 생성하도록 기본적으로 설계된 위의 PWM 생성기 단계의 기능을 통합하고 설명했습니다.
다이어그램에 표시된 1K 사전 설정은 RMS 컨트롤 노브로, 추가 처리를 위해 IC2의 핀 3에서 PWM 형태의 원하는 비례 출력 전압을 획득하도록 적절하게 조정할 수 있습니다. 이는 주전원 220V 또는 120V AC RMS에 해당하는 출력을 생성하도록 설정됩니다.
H- 브리지 드라이버 회로
아래의 다음 다이어그램은 IC IRS2330을 사용하는 단일 칩 H- 브리지 3 상 드라이버 회로를 보여줍니다.
대부분의 복잡성은 칩에 내장 된 정교한 회로에 의해 처리되므로 디자인은 간단 해 보입니다.
잘 계산 된 3 상 신호는 3 상 신호 발생기 스테이지를 통해 IC의 HIN1 / 2 / 3 및 LIN1 / 2 / 3 입력에 적용됩니다.
의 출력 IC IRS2330 6 개의 MOSFET 또는 IGBT 브리지 네트워크와 통합 된 것으로 볼 수 있으며, 드레인은 제어해야하는 모터로 적절하게 구성됩니다.
로우 사이드 MOSFET / IGBT 게이트는 브리지 MOSFET 스테이지로 PWM 주입을 시작하기 위해 위에서 논의한 PWM 생성기 회로 스테이지의 IC2 핀 # 3과 통합됩니다. 이 조절은 궁극적으로 모터가 설정에 따라 원하는 속도를 얻도록 도와줍니다 (첫 번째 다이어그램의 1k 사전 설정을 통해).

다음 다이어그램에서는 필요한 3 상 신호 발생기 회로를 시각화합니다.

3 상 발전기 회로 구성
3 상 발생기는 두 개의 CMOS 칩 CD4035 및 CD4009를 중심으로 구성되어 표시된 핀아웃에 걸쳐 정확한 치수의 3 상 신호를 생성합니다.
3 상 신호의 주파수는 의도 된 3 상 신호의 6 배가되어야하는 공급 된 입력 클록에 따라 달라집니다. 즉, 필요한 3 상 주파수가 50Hz 인 경우 입력 클럭은 50 x 6 = 300Hz 여야합니다.
이는 또한 모터 작동 주파수를 변화시키는 드라이버 IC의 유효 주파수를 변화시키기 위해 위의 클록이 변화 될 수 있음을 의미합니다.
그러나 위의 주파수 변경은 가변 전압에 따라 자동으로 이루어져야하기 때문에 주파수 변환기에 대한 전압이 필수적이됩니다. 다음 단계에서는 필요한 구현을 위해 주파수 변환기 회로에 대한 간단한 정확한 전압에 대해 설명합니다.
일정한 V / F 비율을 만드는 방법
일반적으로 인덕션 모터에서 모터 속도와 토크의 최적 효율을 유지하려면 슬립 속도 또는 로터 속도를 제어해야하며, 이는 일정한 V / Hz 비율을 유지함으로써 가능해집니다. 고정자 자속은 입력 공급 주파수에 관계없이 항상 일정하므로 로터 속도는 다음과 같이 쉽게 제어 할 수 있습니다. V / Hz 비율을 일정하게 유지 .
개방 루프 모드에서는 미리 정해진 V / Hz 비율을 유지하고 수동으로 구현하여 대략적으로 수행 할 수 있습니다. 예를 들어 첫 번째 다이어그램에서 이것은 R1 및 1K 사전 설정을 적절하게 조정하여 수행 할 수 있습니다. R1은 주파수를 결정하고 1K는 출력의 RMS를 조정하므로 두 매개 변수를 적절하게 조정하여 필요한 양 V / Hz를 수동으로 적용 할 수 있습니다.
그러나 유도 전동기 토크와 속도를 비교적 정확하게 제어하려면 폐 루프 전략을 구현해야합니다. 여기서 슬립 속도 데이터는 V / Hz 비율의 자동 조정을 위해 처리 회로에 공급되어야합니다. 값은 항상 거의 일정하게 유지됩니다.
폐쇄 루프 피드백 구현
이 페이지의 첫 번째 다이어그램은 아래와 같이 폐쇄 루프 자동 V / Hz 조정을 설계하기 위해 적절하게 수정할 수 있습니다.

위 그림에서 IC2의 5 번 핀 전위는 동일한 IC의 3 번 핀에서 생성되는 SPWM의 폭을 결정합니다. SPWM은 핀 # 5의 주전원 12V 리플 샘플을 IC2의 핀 # 7에있는 삼각파와 비교하여 생성되며 모터 제어를 위해 로우 사이드 MOSFET에 공급됩니다.
처음에이 SPWM은 지정된 공칭 속도 수준에서 로터 이동을 시작하기 위해 3 상 브리지의 하단 IGBT 게이트를 트리거하는 조정 된 수준 (1K perset 사용)으로 설정됩니다.
로터 로터가 회전하기 시작하면 로터 메커니즘이있는 부착 된 타코미터는 IC2의 핀 # 5에서 비례 적으로 추가 전압을 발생시켜 SPWM이 더 넓어지면서 모터의 고정자 코일에 더 많은 전압을 발생시킵니다. 이로 인해 IC2의 핀 # 5에서 더 많은 전압이 발생하는 회 전자 속도가 더 증가하고 SPWM 등가 전압이 더 이상 증가 할 수없고 고정자 회 전자 동기화가 정상 상태에 도달 할 때까지 계속됩니다.
위의 절차는 모터 작동 기간 동안 자체 조정으로 진행됩니다.
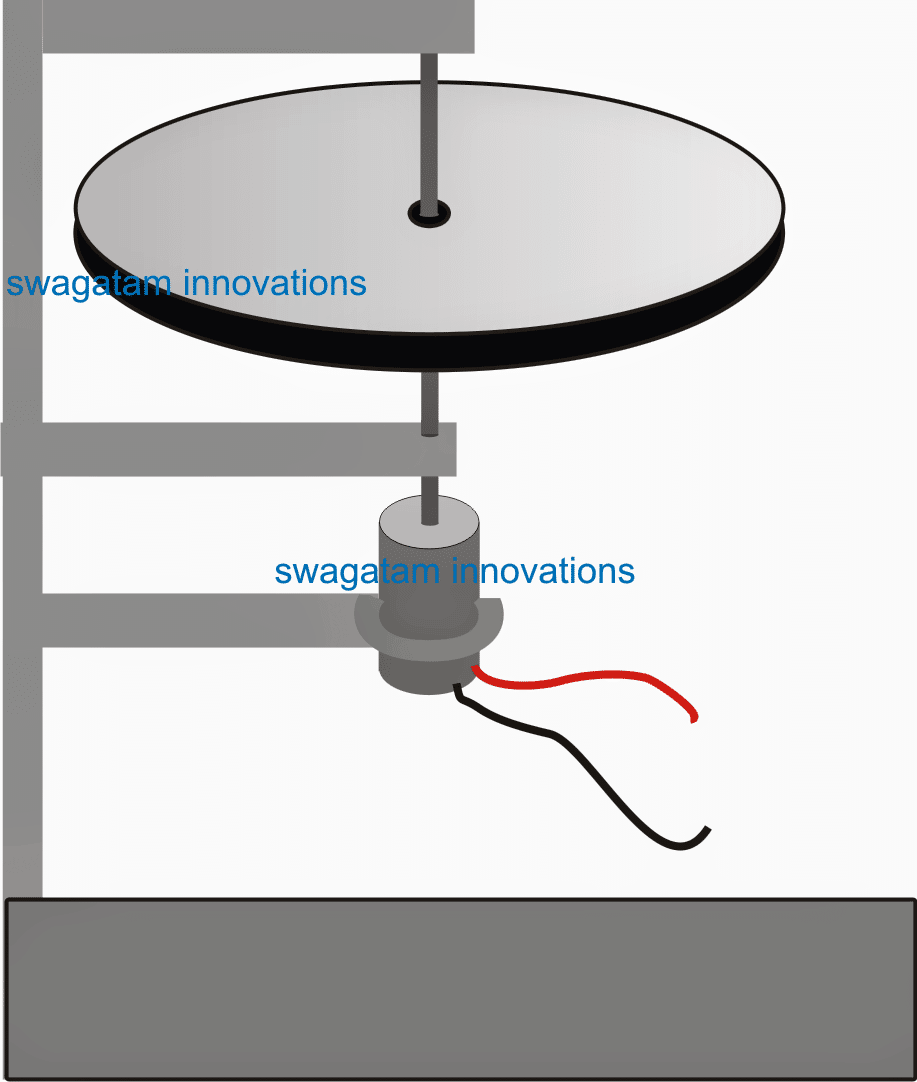
회전 속도계를 만들고 통합하는 방법
간단한 회전 속도계 디자인은 다음 다이어그램에서 볼 수 있습니다. 이것은 회전 주파수가 BC547의베이스에 공급 될 수 있도록 로터 메커니즘과 통합 될 수 있습니다.

여기에서 회 전자 속도 데이터는 홀 효과 센서 또는 IR LED / 센서 네트워크에서 수집되어 T1의베이스로 공급됩니다.
T1은이 주파수에서 진동하고 IC 555 단 안정 회로를 적절하게 구성하여 만든 타코미터 회로를 활성화합니다.
위의 회전 속도계의 출력은 T1베이스의 입력 주파수에 따라 비례 적으로 변합니다.
주파수가 상승함에 따라 맨 오른쪽 D3 출력의 전압도 상승하고 그 반대도 마찬가지이며 V / Hz 비율을 비교적 일정한 수준으로 유지하는 데 도움이됩니다.
속도 조절 방법
일정한 V / F를 사용하는 모터의 속도는 IC 4035의 클록 입력에서 주파수 입력을 변경하여 달성 할 수 있습니다. 이는 IC 555 불안정 회로 또는 표준 불안정 회로의 가변 주파수를 클록 입력으로 공급함으로써 달성 할 수 있습니다. IC 4035.
주파수를 변경하면 모터의 작동 주파수가 효과적으로 변경되어 슬립 속도가 낮아집니다.
이것은 타코미터에 의해 감지되고 타코미터는 IC2의 핀 # 5에서 전위를 비례 적으로 감소시켜 모터의 SPWM 함량을 비례 적으로 감소시키고 결과적으로 모터의 전압을 감소시켜 모터 속도 변화를 정확한 값으로 보장합니다. 필요한 V / F 비율.
수제 V to F 변환기

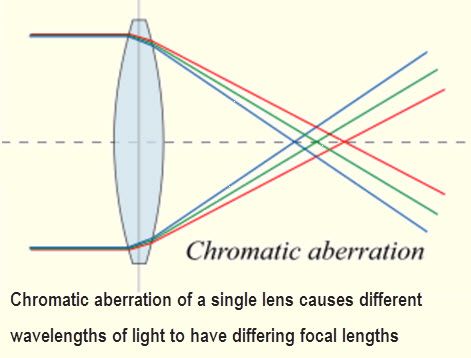
위의 전압-주파수 변환기 회로에서 IC 4060이 사용되며 의도 된 변환을 위해 LED / LDR 어셈블리를 통해 주파수 의존 저항이 영향을받습니다.
LED / LDR 어셈블리는 차광 박스 내부에 밀봉되어 있으며 LDR은 IC의 1M 주파수 종속 저항에 걸쳐 배치됩니다.
LDR / LDR 응답은 상당히 선형 적이기 때문에 LDR에서 LED의 다양한 조명은 IC의 핀 3에서 비례 적으로 변화하는 (증가 또는 감소) 주파수를 생성합니다.
FSD 또는 스테이지의 V / Hz 범위는 1M 저항 또는 C1 값을 적절하게 설정하여 설정할 수 있습니다.
LED는 전압이 유도되고 첫 번째 PWM 회로 단계에서 PWM을 통해 조명됩니다. 이는 PWM이 변함에 따라 LED 조명도 변할 것이며 이는 차례로 위의 다이어그램에서 IC 4060의 핀 3에서 주파수를 비례 적으로 증가 또는 감소시키는 것을 의미합니다.
변환기를 VFD와 통합
IC 4060의이 다양한 주파수는 이제 3 상 발생기 IC CD4035 클록 입력과 통합하기 만하면됩니다.
위의 단계는 3 상 VFD 회로를 만드는 주요 요소를 형성합니다.
이제 IGBT 모터 컨트롤러를 공급하는 데 필요한 DC BUS와 전체 설계를위한 설정 절차에 대해 논의하는 것이 중요합니다.
IGBT H- 브리지 레일에 적용되는 DC BUS는 다음 회로 구성을 사용하여 사용 가능한 3 상 주전원 입력을 정류하여 얻을 수 있습니다. IGBT DC BUS 레일은 '부하'로 표시된 지점에 연결됩니다.

단상 소스의 경우 표준 4 다이오드 브리지 네트워크 구성을 사용하여 정류를 구현할 수 있습니다.
제안 된 3 상 VFD 회로 설정 방법
다음 지침에 따라 수행 할 수 있습니다.
IGBT (모터가 연결되지 않은 상태)에 DC 버스 전압을 적용한 후 레일의 전압이 의도 한 모터 전압 사양과 같아 질 때까지 PWM 1k 사전 설정을 조정합니다.
그런 다음 IC IRS2330 입력을 주어진 모터 사양에 따라 필요한 올바른 주파수 레벨로 조정하기 위해 IC 4060 1M 사전 설정을 조정합니다.
위의 절차가 완료되면 지정된 모터에 다른 전압 레벨, V / Hz 매개 변수를 연결하고 공급할 수 있으며 연결된 모터를 통해 자동 V / Hz 작동을 확인할 수 있습니다.
Previous : 성장하는 빛 회로를 만드는 방법 다음 : 연수기 회로 탐색