이 게시물에서는 선호하는 움직임 세트로 인큐베이터 모터 메커니즘을 작동하기위한 역방향 순방향 타이머 회로를 배웁니다. 이 아이디어는 안와르 씨가 요청했습니다.
기술 사양
저는 인도네시아 출신입니다 ..... 고 토크 모터 (자동차의 DC 모터 파워 윈도우)가 장착 된 인큐베이터 타이머의 회로도가 필요합니다. DC 모터가 끝 위치에 도달 할 때까지 양방향으로 작동 한 다음 전원이 다시 공급 될 때 다른 방향으로 작동하도록 극성을 멈추고 전환하려고합니다. 그런 다음 다른 쪽 끝에서도 동일한 작업을 수행하십시오.
1. 타이머가 1 분 동안 전원을 켭니다. (7:00 am -7 : 01am)
2. 모터가 정지 위치 (예 : 30 초)에 도달 할 때까지 한 방향으로 작동합니다.
3. 모터 전원이 정지 위치에 도달하면 꺼지고 1 분 동안 지연됩니다. 주 전원을 종료 / 끄는 타이머. 또한 극성을 반대로합니다.
4. 다음에 메인 타이머가 켜지면 (10 : 00-10 : 01) 같은 것을 역방향으로 투여하고 계속 반복합니다.
5. 12 VDC 모터 리버스 (모터 + 및-에서 단 두 개의 케이블)
6. Rev / Fwd 모터 용 LED 표시기가 필요
저를 도와 주시겠습니까?
도움을 주셔서 미리 감사드립니다.
이것은 100 % 신뢰할 수 있어야하는 중요한 가정 프로젝트입니다.
디자인

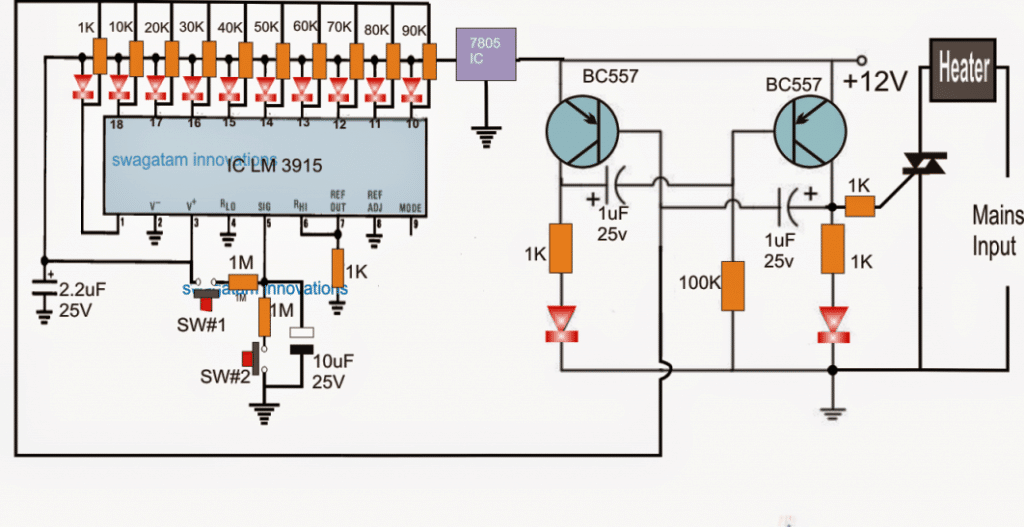
위의 그림에서 우리는 미리 정해진 시간 간격 후에 인큐베이터 모터의 제안 된 역 전진 동작을 구현하기위한 설계를 시각화 할 수 있습니다.
전원이 켜지는 순간 다음과 같은 시나리오가 있습니다.
'설정'에 대한 자기 스위치는 모터 또는 설계된 인큐베이터 메커니즘이 제로 시작 위치에있는 동안 비활성화 된 상태이거나 눌린 상태로 가정 할 수 있습니다.
가급적이면 'set'/ 'reset'스위치는 자기 리드 스위치를 사용하여 구현해야합니다.
전원이 켜진 상태에서 IC 4060은 C2를 통해 재설정되어 0부터 계산 프로세스를 시작하고 pin3은 0 논리로 렌더링됩니다.
이 초기 제로 로직은 C3를 통해 T1의베이스에 공급되어 T3 및 관련 릴레이가 활성화되도록 즉시 수행합니다. 프로세스의 R7은 T1 / T3이이 모드에서 래치되도록합니다.
이 지점에서 DPDT 릴레이는 N / O 접점에서 작동하여 모터를 시작하고 메커니즘은 '전진'동작을 가정합니다.
모터가 움직이기 시작하면 '설정'버튼이 해제되어 T4와 상단 SPDT가 작동 할 기회를 얻습니다. 여기서 SPDT 릴레이는 N / O 위치 전환을 달성하여 DPDT의 N / C 접점을 대기 상태로 렌더링합니다. 공급..
모터 및 / 또는 메커니즘은 '리셋'위치에 도달 할 때까지 계속 이동하여 T2가 T1 / T4 래치를 활성화하고 차단합니다.
T4 스위치가 꺼지면 DPDT 릴레이는 위치를 N / O에서 N / C로 변경하고 모터 메커니즘에 반대 (역방향) 이동을 제공합니다.
인큐베이터 모터 메커니즘은 이제 방향을 바꾸고 T4의 기본 드라이브를 빠르게 끄는 '설정'지점에 도달 할 때까지 역방향 동작을 시작하고 SPDT는 DPDT의 절단 전력을 끄고 전체 메커니즘이 정지 상태가됩니다. .
그 동안 IC 4060은 핀 3에서 높은 로직을 통과 한 후 (C3 방전에 의해) 제로 로직을 다시 생성 할 때까지 계속 카운트합니다.
사이클이 다시 시작되고 위에서 설명한 절차를 반복합니다.
Previous : Arduino로 LED 깜박임 – 전체 자습서 다음 : 고전력 산업용 주전원 서지 억 제기 탐색