
저비용, 견고한 설계, 덜 복잡하고 유지 보수가 쉬운 AC 모터와 같은 몇 가지 장점으로 인해 많은 산업 작업이 다음을 사용하여 수행됩니다. AC 드라이브 DC 드라이브보다. AC 유도 전동기는 시동, 속도 제어, 보호 등의 측면에서 고유 한 특성과 성능을 가진 특수 유형의 전기 모터입니다.

AC 유도 전동기
광범위한 성능 응용 프로그램은 3 상 유도 전동기를 만듭니다 산업용 구동 시스템 설치 용량의 85 %를 차지합니다. 이 모터에 대한 기본 정보와 SVPWM의 특수 제어 기술에 대해 논의하겠습니다.
삼상 AC 유도 전동기
3 상 AC 유도 전동기는 3 상 전원에서 작동하도록 설계된 회전 전기 기계입니다. 이 3 상 모터는 비동기 모터라고도합니다. 이러한 AC 모터는 두 가지 유형이 있습니다. 다람쥐 및 슬립 링 유형 유도 전동기 . 이 모터의 작동 원리는 회전 자기장의 생성을 기반으로합니다.
3 상 유도 전동기 구조
이 3 상 모터는 고정자와 회 전자로 구성되며 그 사이에는 전기적 연결이 없습니다. 이 고정자 및 회전자는 히스테리시스 및 와전류 손실을 줄이기 위해 고 자성 코어 재료를 사용하여 구성됩니다.

3 상 유도 전동기 구조
고정자 프레임은 주철, 알루미늄 또는 압연 강철을 사용하여 구성 할 수 있습니다. 고정자 프레임은 고정자 적층 코어, 권선 및 기타 환기 장치에 필요한 기계적 보호 및 지원을 제공합니다. 고정자는 슬롯 형 라미네이션에 장착 된 120도 위상 편이에서 서로 겹치는 3 상 권선으로 감겨 있습니다. 3 개의 권선의 6 개 끝을 꺼내어 터미널 박스에 연결하여 이러한 권선이 3 상 주 전원에 의해 여기되도록합니다.
이 권선은 절연 슬롯 라미네이션에 바니시가 장착 된 구리선으로 절연되어 있습니다. 모든 작동 온도에서이 함침 된 바니시는 단단하게 유지됩니다. 이 권선은 절연 저항이 높고 염분 대기, 습기, 알칼리성 연기, 오일 및 그리스 등에 대한 저항성이 높습니다. 전압 수준에 맞는 권선은 어느 쪽이든 연결됩니다. 스타 또는 델타 연결 .

다람쥐 케이지 유도 전동기
3 상 AC 유도 전동기의 회전자는 슬립 링과 농형 유도 전동기에서 다릅니다. 슬립 링 유형의 로터는 원통형 로터의 양쪽 끝에 단락 된 무거운 알루미늄 또는 구리 막대로 구성됩니다. 유도 전동기의 축은 고정자 내에서 자유 회전을 보장하고 마찰을 줄이기 위해 양 끝에서 두 개의 베어링에지지됩니다. 그것은 절연되지 않은 무거운 알루미늄 또는 구리 막대가 배치되는 원주 주위에 구멍이 뚫린 균일 한 간격의 강철 라미네이션 스택으로 구성됩니다.
슬립 링형 로터는 내부적으로 한쪽 끝이 별표 표시된 3 상 권선으로 구성되고 다른 쪽 끝은 바깥쪽으로 가져와 로터 샤프트에 장착 된 슬립 링에 연결됩니다. 그리고 높은 시동 토크를 개발하기 위해 이러한 권선은 카본 브러시의 도움으로 가변 저항에 연결됩니다. 이 외부 저항기 또는 가변 저항기는 시작 기간에만 사용됩니다. 모터가 정상 속도에 도달하면 브러시가 단락되고 감긴 로터가 다람쥐 로터로 작동합니다.
3 상 유도 전동기의 작동 원리

3 상 유도 전동기의 작동 원리
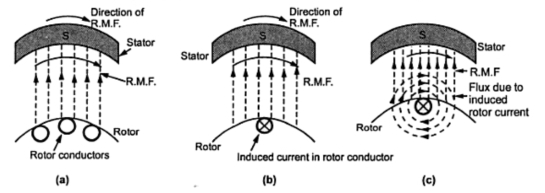
- 모터가 3 상 전원으로 여자되면 3 상 고정자 권선은 동기 속도로 회전하는 일정한 크기로 120 변위를 갖는 회전 자기장을 생성합니다. 이 변화하는 자기장은 패러데이의 전자기 유도 법칙에 따라 로터 도체를 절단하고 그 안에 전류를 유도합니다. 이러한 로터 도체가 단락되면 전류가 이러한 도체를 통해 흐르기 시작합니다.
- 고정자의 자기장이 존재하는 경우 회 전자 도체가 배치되므로 Lorenz 힘 원리에 따라 기계적 힘이 회 전자 도체에 작용합니다. 따라서 모든 로터 도체 힘, 즉 기계적 힘의 합은 로터에서 회전 자기장의 동일한 방향으로 움직이는 경향이있는 토크를 생성합니다.
- 이 로터 도체의 회전은 또한 로터의 유도 전류가 생산 원인에 반대한다는 Lenz의 법칙에 의해 설명 될 수 있습니다. 여기서이 반대는 회전 자기장입니다. 이 결과 로터는 고정자 회전 자기장과 동일한 방향으로 회전하기 시작합니다. 회 전자 속도가 고정자 속도보다 크면 회 전자 회전의 이유가 회 전자 및 고정자 자기장의 상대 속도이기 때문에 회 전자에 전류가 유도되지 않습니다. 이 고정자와 회 전자 필드 차이를 슬립이라고합니다. 고정자와 회 전자 사이의 상대적 속도 차이로 인해 3 상 모터를 비동기 기계라고합니다.
- 위에서 논의했듯이 고정자 필드와 회 전자 도체 사이의 상대 속도는 회 전자를 특정 방향으로 회전시킵니다. 따라서 회전을 생성하기 위해 회 전자 속도 Nr은 항상 고정자 필드 속도 Ns보다 작아야하며이 두 매개 변수 간의 차이는 모터의 부하에 따라 달라집니다.
AC 유도 전동기의 속도 차이 또는 슬립은 다음과 같이 주어집니다.

- 고정자가 고정되면 Nr = 0이므로 슬립은 1 또는 100 %가됩니다.
- Nr이 동기 속도 일 때 슬립은 0이되어 모터가 동기 속도로 작동하지 않습니다.
- 무부하에서 최대 부하로의 3 상 유도 전동기의 슬립은 약 0.1 % ~ 3 %이므로 유도 전동기를 정속 전동기라고합니다.
3 상 유도 전동기의 SVPWM 제어
유도 전동기를 제어하기 위해 가장 일반적으로 PWM 인버터 기반 드라이브가 사용됩니다. 고정 주파수 드라이브와 비교할 때 PWM 다이빙 제어 전류의 전압과 주파수의 크기와 유도 전동기에 적용된 전압. 전원 스위치 게이트에 적용되는 PWM 신호를 변경함으로써 이러한 드라이브가 전달하는 전력량도 변경되어 3 상 유도 전동기 속도 제어가 가능합니다.

Edgefxkits.com의 3 상 유도 전동기의 SVPWM 제어
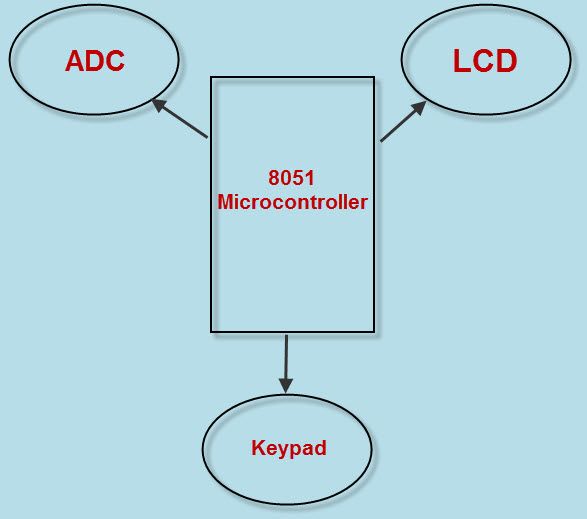
3 상 모터 드라이브를 제어하기 위해 여러 PWM (Pulse Width Modulation) 방식이 사용됩니다. 그러나 가장 널리 사용되는 SPWM (Sine PWM) 및 SVPWM (Space Vector PWM)이 사용됩니다. SPWM과 비교하여 SVPWM 제어는 더 높은 수준의 기본 전압을 제공하고 고조파 성분을 줄입니다. 여기에서는 다음을 사용하여이 SVPWM 컨트롤의 실제 구현을 제공했습니다. 8051 마이크로 컨트롤러 .
아래 회로에서는 DC 버스 전압에 따라 3 개의 출력 전압을 얻기 위해 3 레벨 전압 인버터가 사용됩니다. 단상 전원은 마이크로 컨트롤러 회로와 인버터 회로 모두에 DC 전원을 공급하도록 정류됩니다 .8051 마이크로 컨트롤러는 게이트 드라이버 IC에 제공되는 SVPWM 신호를 생성하도록 프로그래밍되어 있습니다.

Edgefxkits.com의 3 상 유도 전동기의 SVPWM 제어 블록 다이어그램
인버터 회로는 가변 3 상 전원을 생성하는 6 개의 MOSFET으로 구성되며 각 위상에 대해 2 개의 MOSFET이 배치됩니다. 이 MOSFET 게이트는 게이트 드라이버 IC에 연결됩니다. 마이크로 컨트롤러 게이트 드라이버 스위치에서 PWM 신호를 수신하면 MOSFET 가변 AC 출력 전압이 생성됩니다. 따라서 전압 및 주파수가 변경되는이 가변 AC는 다양합니다. 모터의 속도 .
이것은 구조와 작동 원리를 가진 AC 유도 전동기에 대한 기본 정보입니다. 이 외에도 모터의 속도를 제어하는 SVPWM 기술은 위에서 본 다른 PWM 기술보다 많은 장점이 있습니다. 의문이 있다면 프로그래밍 마이크로 컨트롤러 SVPWM 기술을 구현하려면 아래에 의견을 말하여 문의하십시오.
사진 크레딧 :




{kind=link}
{kind=link}
{kind=link}