로봇은 지능형 기계 장치이며 최초의 로봇은 1920 년 '체코 극작가 Carel Capek'에 의해 구성되었습니다. Robotics는 설계, 제작 및 운영을 다루는 엔지니어링 분야입니다. 로봇 공학이라는 단어는 로봇이라는 용어에서 파생되었습니다. 현재 직렬 형, 병렬 형, 보행 형, 이동형 로봇 등 다양한 종류의 로봇을 사용할 수 있습니다. 로봇 공학의 부품은 주로 전원 공급 장치, 컨트롤러, 그리퍼, 조작기 및 엔드 이펙터로 구성됩니다. 우리가 로봇에 대해 생각할 때 우리 마음을 강타하는 주요 요소는 누군가를 모방하는 것입니다. 그러나 실제로 로봇에 대한 실제 정의는 없습니다. 그러나 지능, 감지, 에너지, 움직임 등과 같이 로봇이 가져야하는 몇 가지 기본 특성이 있습니다. 일부 로봇은 특정 작업을 수행하기 위해 스스로 작업합니다. 그러나 대체 로봇은 인간의 도움이 필요합니다. 결과적으로 이러한 로봇은 의존적입니다. Robotics Project Ideas는 의료, 우주 통신 및 군사 응용
공학 학생을위한 최신 로봇 공학 프로젝트 아이디어
요즘 몇몇 공대생들은 로봇 프로젝트에 많은 관심을 보이고 있습니다. 그들은 다른 것에 비해 많은 관심을 만듭니다 전자 프로젝트 . 교육 수준에서 로봇 공학에 대한 이러한 프로젝트는 매우 인기가 있으며 로봇, 픽 앤 플레이스 로봇, 소방, 벽 트랙, 휴머노이드 및 헥사 포드 등이 있습니다.이 로봇 프로젝트 아이디어는 공대생을위한 연습을하는 동안 도움이 될 것입니다. . 그래서 우리는 공대생들에게 이들 중에서 선택하도록 조언하는 경향이 있습니다. 로봇 키트 이들을 위해 작동 할 수 있기 때문입니다.

로봇 기반 프로젝트 아이디어
나이트 비전 무선 카메라를 사용하는 전쟁 현장 감시 로봇
이 프로젝트의 주요 목적은 RF 기술과 무선 카메라를 사용하여 로봇 차량을 설계하는 것입니다. 여기서 RF 기술은 원격 작동에 사용되고 무선 카메라는 모니터링 목적으로 사용됩니다. 카메라와 함께 로봇은 야간 투시 기능으로 비디오를 전송할 수 있습니다. 이 유형의 로봇은 감시 목적으로 전쟁터에서 도움이됩니다. 안 8051 마이크로 컨트롤러 원하는 작업에 사용됩니다.

나이트 비전 무선 카메라를 장착 한 전쟁터 감시 로봇
이 프로젝트는 야간 투시경 카메라를 사용하여 어두운 곳에서도 이미지를 캡처하고 TV 수신기에 무선으로 전송합니다. 이 로봇은 제어 장치에 정보를 전송하고 적의 땅을 감시하는 것과 같은 군사 응용 분야에 사용됩니다. 이 로봇은 RF 통신을 사용하여 제어 푸시 버튼 세트로.
또한이 프로젝트는 DTMF 기술 . 이 기술을 사용하여 휴대폰을 사용하여 로봇 차량을 제어 할 수 있습니다. RF 기술에 비해이 기술은 장거리 통신 범위에서 이점이 있습니다.
두 역을 왕복하는 자동 지하철 열차
이 프로젝트의 주요 목표는 지하철 열차에 사용되는 기술을 시연하는 것입니다. 이 프로젝트는 많은 선진국에서 사용됩니다. 메트로 열차에는 컨트롤러가 장착되어있어 한 역에서 다른 역으로 열차를 자동으로 운행 할 수 있습니다.

역 사이를 왕복하는 자동 지하철 열차
이 자동 지하철 프로젝트 자동 시작 및 중지 메커니즘으로 설계되었습니다. 따라서 지하철은 특정 시간에 정차하고 특정 시간 후에 시작됩니다. 문을 열고 닫는 자동 메커니즘으로 구성되어 있으며 열차에 탑승하는 동안 사람의 수를 계산합니다.
로봇 차량 움직임 감지
이 프로젝트의 주요 목표는 특정 경로를 추적하는 로봇을 설계하는 것입니다. 경로는 흰색 바닥에 검은 색 차선이 될 수 있습니다. 궤도 감지 로봇 차량은 자동 차량의 공공 장소에서 가이드 역할을하는 것부터 다양한 응용 분야에서 사용되고 있습니다. 여기에서이 로봇 차량은 두 모터에 대해 감지 된 곡선의 검은 색 차선에서 움직 이도록 만들어진 한 쌍의 센서로 설계되었습니다.

로봇 차량 움직임 감지
이 트랙 감지 로봇 차량은 두 개의 모터, DC 전원으로 구성됩니다. 이 두 모터는 스위치 역할을하는 트랜지스터에 의해 제어됩니다. IR LED와 포토 다이오드를 포함하는 각 센서는 회로 아래에 배치됩니다. 두 센서가 흰색 바닥을 감지하면 모터가 그에 따라 회전합니다.
회전 할 때 검은 색 경로를 만나면 모터 중 하나가 센서 입력과 함께 회전을 멈 춥니 다. 센서의 작동 원리는 IR LED가 흰색 바닥에 빛을 내면 반사되는 것입니다. 반사광이 포토 다이오드에 떨어지면 저항이 감소하여 모터 스위치의 전도를 제어합니다.
금속 탐지기 로봇 차량
이 프로젝트의 주요 목적은 금속과 지뢰를 감지하는 로봇 차량을 설계하는 것입니다. 지뢰는 지하에 위치한 불안정한 장치이며 금속 탐지기를 사용하여 수동으로 탐지하는 것은 위험합니다. 이 프로젝트에서는 로봇에 금속 탐지기가 내장되어 RF 통신을 통해 제어됩니다.

금속 탐지기 로봇 공학 프로젝트 아이디어
송신기 끝에서 푸시 버튼의 수는 마이크로 컨트롤러에 인터페이스 r은 특정 동작으로 로봇을 실행합니다. 버튼을 누르면 이진 데이터를 버튼으로 보내는 마이크로 컨트롤러로 신호가 전송됩니다. 인코더는 병렬 데이터를 직렬 데이터로 변환하는 데 사용되며이 명령은 RF 모듈을 사용하여 전송됩니다.
수신기 측에서이 신호는 디코더에 의해 디코딩됩니다. 신호를 기반으로 마이크로 컨트롤러는 모터를 구동하기 위해 모터 드라이버에 관련 신호를 제공합니다. 로봇이 원하는 동작으로 움직입니다. 금속 검출기는 로봇 회로에 내장되어 금속을 감지하고 부저를 사용하여 표시합니다.
레이저 빔 배열이있는 RF 제어 로봇 차량
이 프로젝트는 RF 기술을 사용하여 로봇 차량을 제어하도록 설계되었습니다. 저전력 레이저 광은 빔으로 멀리있는 물체를 끝낼 가능성을 보여주기 위해 인터페이스됩니다. 원하는 작업을 위해 8051 마이크로 컨트롤러가 사용됩니다.

레이저 빔 배열이있는 RF 제어 로봇 차량
송신 측에서 푸시 버튼을 사용하여 수신기에 명령을 보내 로봇의 움직임을 제어하여 오른쪽, 왼쪽 앞으로 또는 뒤로 이동합니다. 수신 측에서 두 개의 모터가 차량의 이동에 사용되는 마이크로 컨트롤러에 연결됩니다.
RF 송신기는 적절한 안테나를 사용하여 적절한 범위 (최대 200m)의 이점을 갖는 RF 원격 제어 역할을하며, 수신기는 필요한 작업을 위해 모터 드라이버 IC를 통해 DC 모터를 구동하기 위해 다른 마이크로 컨트롤러에 공급하기 전에 디코딩합니다.
레이저 펜이 로봇 본체에 장착되고 그 작동은 송신단에서 적절한 신호를 통해 출력되는 마이크로 컨트롤러에서 수행됩니다. 사용 된 레이저 광은 데모 용이며 강력한 것이 아닙니다.
또한이 프로젝트는 DTMF 기술 . 이 기술을 사용하여 휴대폰을 사용하여 로봇 차량을 제어 할 수 있습니다. 이 기술은 RF 기술에 비해 장거리 통신 범위에서 장점이 있습니다.
로봇 차량을 따라가는 라인
A-Line Follow Robot은 자신이 움직이는 특정 경로를 따라가는 로봇입니다. 경로는 흰색 바닥의 검은 색 경로 또는 자기장 일 수 있습니다. 이 로봇은 공공 장소의 가이드에서 자동 차량에 이르기까지 다양한 응용 분야에서 사용되고 있습니다. 여기에서는 각 모터에 대해 한 쌍의 센서에 의해 감지되는 곡선의 검은 색 경로를 따라 이동하도록 만들어진 Line Follow 로봇 차량이 개발되었습니다. 여기서 로봇 차량은 두 개의 모터로 구성되며 각 모터에 대한 DC 공급은 스위치 역할을하는 트랜지스터를 사용하여 제어됩니다.

로봇 공학 프로젝트 아이디어를 따르는 라인
IR LED와 포토 다이오드로 구성된 한 쌍의 센서가 회로 아래에 배치됩니다. 흰색 바닥은 센서에 의해 감지되고 모터는 그에 따라 회전합니다. 회전 할 때 검은 색 경로를 만나면 모터 중 하나가 센서 입력과 함께 회전을 멈 춥니 다. 센서는 IR LED의 빛이 흰색 표면에 떨어지면 반사되고 포토 다이오드에 떨어지면 반사 된 빛이 저항을 줄여 모터 스위치의 전도를 제어하는 원리로 작동합니다.
장애물 회피 로봇 차량
로봇은 자체적으로 환경을 감지하거나 원격 또는 다른 수단을 사용하여 수동으로 제어 할 수 있습니다. 여기에서 주변 영역을 감지하고 그에 따라 움직이는 전자동 로봇이 개발되었습니다. 전방에있는 물체를 감지하는 센서 배열이 내장되어 있으며 이에 따라 로봇은 충돌을 피하기 위해 방향을 변경합니다. 이러한 로봇 차량은 성역과 같은 장소에서 사용할 수 있습니다.

장애물 회피 로봇 차량
초음파 센서는 장애물의 존재를 감지하는 데 사용됩니다. 이 센서는 센서에 의해 수신되어 전기 신호로 변환되는 물체에 의한 초음파 반사 원리로 작동합니다. 중단 신호를 수신하면 마이크로 컨트롤러는 모터 드라이버에 적절한 명령을내어 모터 중 하나가 중지되고 다른 모터가 회전하여 로봇에 방향을 변경합니다.
소프트 캐칭 그리퍼가 장착 된 Pick N Place 로봇 차량
로봇 차량을 사용하여 물체를 집어 그에 따라 배치 할 수 있습니다. 이를 위해 로봇은 모터를 사용하여 그에 따라 모멘트를 제어하는 엔드 이펙터로 구성됩니다. 로봇 차량은 RF 통신을 사용하는 버튼 세트로 원격 제어됩니다.

픽앤 플레이스 로봇
송신기 측에서 키패드는 마이크로 컨트롤러와 인터페이스되며 관련 키를 누르면 마이크로 컨트롤러가 해당 키에 대한 바이너리 코드를 생성하고이 바이너리 코드는 직렬 형식으로 변환되어 RF 모듈과 RF 안테나를 통해 전송됩니다.
수신기에서 두 개의 모터는 로봇 차량에 관련 동작을 제공하는 데 사용되고 다른 두 개의 모터는 물체를 잡고 원하는 위치에 놓기 위해 그리퍼의 움직임을 제어하는 데 사용됩니다. 송신기에서 전송 된 명령은 디코딩되고 마이크로 컨트롤러에서 사용되어 모터 드라이버 IC에 적절한 신호를 제공합니다.
소방 로봇 차량
로봇은 화재 사고와 같은 많은 위험한 상황에서 사용할 수 있습니다. 여기서 그러한 프로토 타입은 노즐과 펌프가있는 수도관으로 구성된 데모입니다. 로봇의 움직임과 노즐에 의한 물 분사는 일련의 푸시 버튼을 사용하여 원격으로 제어되며 명령은 RF 통신을 통해 로봇으로 전송됩니다.

RF 기반 소방 로봇 차량 프로젝트
매장 관리를위한 터치 스크린 기반 원격 제어 로봇 차량
여기에서 RF 통신을 사용하여 제어되는 픽 앤 플레이스 로봇이 개발되었습니다. 터치 스크린 패널은 로봇이 원하는 방향으로 적절한 동작을하고 픽앤 플레이스 작업을 제어하기 위해 로봇이 송수신하는 명령을 내리는 데 사용됩니다.
MATLAB을 사용한 색상 감지 로봇
이 프로젝트는 MATLAB을 사용하여 캡처 된 이미지의 색상을 감지하는 로봇 차량을 구현합니다. 이 프로젝트는 이미지 내의 색상을 감지하면서 인간의 노력을 줄이는 데 매우 유용합니다. 이 프로젝트는 MATLAB 기반 이미지 처리 기술을 사용하여 구현할 수 있습니다. 이 로봇에는 색상 감지와 같은 MATLAB을 사용하는 몇 가지 기능이 있으며, 인간의 노력을 줄이고 효율적이며 시간을 절약 할 수 있습니다.
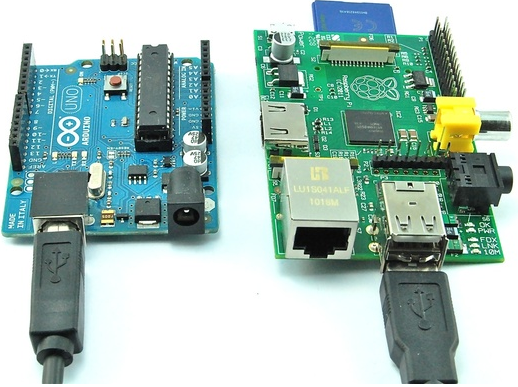
Arduino 기반 스마트 폰 제어 로봇 자동차
이 프로젝트는 Arduino 기반의 스마트 폰 제어 로봇 자동차를 만드는 데 사용됩니다. 이 안드로이드 폰 제어 로봇은 블루투스 기술을 사용하여 로봇을 제어합니다. 이 프로젝트에 사용 된 주요 구성 요소는 로봇 자동차, Arduino Uno, Android Phone 및 Bluetooth 모듈입니다. 이를 위해 안드로이드 모바일 사용자는 휴대폰에 앱을 다운로드하여 설치해야하며, 모바일 사용자는 모바일에서 블루투스 옵션을 꺼야합니다.
여기에서 블루투스는 로봇 제어에 핵심적인 역할을하는 무선 통신 기술입니다. 여기에서 안드로이드 폰은 로봇과 연결된 블루투스에 명령을 생성합니다. 명령은 오른쪽, 왼쪽, 앞으로 및 뒤로 이동합니다. 이 블루투스 수신기는 명령을 받아 마이크로 컨트롤러로 전송하여 모터를 관리합니다. 그 후이 마이크로 컨트롤러는 모터를 활성화하기 위해 모터 드라이버 IC에 신호를 보냅니다.
Arduino를 사용한 로봇 프로젝트
Arduino 기반 로봇 공학 프로젝트 아이디어 목록은 아래에서 설명합니다.

Arduino Robotics 프로젝트 아이디어
Arduino를 통해 작동되는 로봇 잔디 깎이
이 프로젝트는 장애물을 피하여 정원의 특정 영역에서 잔디를 자르는 데 사용되는 로봇을 설계합니다. 이 로봇은 중앙 제어 장치와 같은 Arduino 컨트롤러를 사용하여 태양 에너지를 통해 작동 할 수 있습니다.
Arduino Board를 이용한 Smart Boat Robot
이 간단한 로봇 프로젝트는 장애물 감지, 조명 제어 등을위한 멧돼지를 만들기 위해 Arduino 보드로 설계되었습니다.
Arduino를 사용한 빛 찾기 로봇
이 프로젝트는 빛을 따르는 로봇을 디자인하는 데 사용됩니다. 이 프로젝트의 제어는 로봇의 간섭없이 빛을 사용하여 수행 할 수 있습니다. 그래서 이런 종류의 프로젝트는 빛을 따르는 로봇이라고도합니다. 이 프로젝트는 장애물 감지 기능을 포함한 Arduino 보드로 설계 할 수 있습니다.
제설기 로봇
이 프로젝트는 Arduino Uno로 제설 로봇을 설계하는 데 사용됩니다. 이 로봇은 무선 주파수 장치에서 전송되는 명령을 사용하여 작동합니다. 이 장치는 로봇 및 쟁기의 움직임을 필요한 방식으로 제어하는 데 사용됩니다.
자기 균형 로봇
이 프로젝트의 주요 목적은 두 개의 바퀴를 포함하는 밸런싱 로봇을 설계하는 것입니다. 이 프로젝트는 안정성을 확보하기 위해 별도의 디지털 제어를 위해 Arduino로 구축 할 수 있습니다.
네 발 달린 로봇
이 프로젝트는 네 발 달린 동물 로봇을 설계하는 데 사용됩니다. Arduino Uno 컨트롤러를 통해 제어되는 두 개의 서보를 포함하는 간단하고 비용 효율적인 4 족 로봇입니다.
Arduino를 사용한 로봇 조작기
이 프로젝트는 인간의 팔과 유사한 기능을 가진 로봇 팔을 구현합니다. 이러한 기능은 암에 내장 된 프로그램으로 달성 할 수 있습니다. 로봇 조작기의 설계는 Arduino 컨트롤러를 사용하여 수행 할 수 있습니다.
옴니 휠 로봇
이 프로젝트는 옴니 휠 로봇을 구현합니다. 이 로봇은 설계 및 조립이 매우 쉽습니다. 이런 종류의 로봇은 새로운 유형의 행동을 허용합니다. 이 로봇의 구현은 모터 드라이버 회로를 통해 Arduino 보드를 사용하여 수행 할 수 있습니다.
Arduino를 사용한 로봇 식 진공 청소기
이 프로젝트는 자율 청소기 로봇을 설계합니다. 이 로봇은 센서, Arduino 컨트롤러 및 모터 드라이버 회로를 통해 사람의 간섭없이 집을 청소하는 데 사용됩니다.
미래를위한 로봇 아이디어
일상 생활에서 로봇은 다양한 지점에서 여러 가지 목적으로 사용됩니다. 그중 일상 생활에서 사용되는 로봇은 다음과 같습니다. 일상 생활 과학 프로젝트의 로봇 공학 프로젝트 아이디어 목록은 다음과 같습니다.
- 자율 주행 로봇
- 범죄 퇴치 용 로봇
- 국방, 보안 및 감시 분야의 로봇
- 교육 분야의 로봇
- 하인과 같은 로봇
- 요리 로봇
- 의료 분야의 로봇
- 위험한 작업을 수행하는 로봇
- 주택 관리 용 로봇
로봇 팔 프로젝트 아이디어
다음 로봇 공학 프로젝트 아이디어는 공대생을 위해 Arduino를 사용하는 로봇 팔 프로젝트를 기반으로합니다.

Arm을 기반으로 한 로봇 공학 프로젝트 아이디어
무선 장갑을 통해 제어되는 로봇 팔
이 프로젝트는 무선 장갑을 사용하여 로봇의 손을 제어하는 시스템을 구현합니다. 이 프로젝트는 Arduino Nano, 배터리, 트랜시버 모듈, 서보 모터 및 관련 센서로 설계 할 수 있습니다.
Nunchuck을 통해 제어되는 로봇 팔
이 프로젝트는 Arduino Mega의 도움으로 로봇 팔을 프로그래밍하고 장착하는 방법을 알려줍니다. 이 프로젝트는 로봇 팔을 제어하기 위해 Nintendo Nunchuk를 사용하기 때문에 다른 팔 기반 프로젝트와 다른 프로젝트입니다. 찾기가 매우 간단하고 저렴하며 센서 그룹이 포함되어 있습니다.
제스처를 통해 제어되는 로봇 팔
이 프로젝트는 손동작으로 제어 할 수있는 로봇을 디자인합니다. 여기에서 운동 센서는 제스처를 캡처하는 데 사용됩니다. 로봇 팔의 개발은 오른팔의 어깨와 손의 움직임을 모방 한 서보 모터를 통해 이루어질 수 있습니다.
컴퓨터 마우스 제어 로봇 팔
이 프로젝트는 로봇 팔을 설계하는 데 사용되며이 팔은 컴퓨터의 마우스를 통해 제어 할 수 있습니다. 이 프로젝트는 MATLAB을 사용하여 자체 결정을 내림으로써 이미지 처리에도 사용됩니다.
Android 앱 제어 로봇 팔
이 프로젝트는 주로 안드로이드 앱을 사용하는 Arduino 및 Bluetooth 모듈의 도움으로 로봇 팔을 제어하기 위해 구현됩니다. 이 프로젝트의 필수 구성 요소는 DC 모터, Arduino mega 및 Bluetooth 모듈 (HC-05)입니다.
다음은 몇 가지 흥미로운 초록이있는 로봇 공학 프로젝트 아이디어 마지막 해 공학 학생들을 위해. '추상'링크를 클릭하면 초록과 함께 다음 로봇 공학 프로젝트 아이디어의 블록 다이어그램 세부 정보를 얻을 수 있습니다.
- 레이저 빔 배열이있는 RF 제어 로봇 차량 – 요약 .
- 로봇 차량을 따르는 라인 – 요약 .
- 소프트 캐칭 그리퍼로 픽 앤 플레이스 – 요약 .
- 마이크로 컨트롤러를 이용한 소방 로봇 차량 – 요약 .
- 전쟁터 감시 용 야간 무선 카메라가 장착 된 RF 제어 로봇 – 요약 .
- 로봇 차량을 따르는 마이크로 컨트롤러 기반 라인 – 요약 .
- 초음파 센서를 이용한 장애물 회피 로봇 차량 – 요약 .
- 역 사이를 왕복하는 자동 지하철 열차 – 요약 .
- IR 제어 로봇 차량 – 요약 .
- 휴대폰 제어 로봇 차량 – 요약 .
- 금속 탐지기 로봇 차량 – 요약 .
- 장거리 음성 인식 기능이있는 음성 제어 로봇 차량 – 요약
- Android에서 원격으로 작동하는 소방 로봇 – 요약
- IR 제어 로봇 차량 – 요약
로봇 공학에 대한 미니 프로젝트
미니 로봇 프로젝트 아이디어에는 다음이 포함됩니다. 이 로봇 공학 프로젝트 아이디어는 공학 분야의 초심자뿐만 아니라 졸업생에게도 매우 유용합니다.

간단한 로봇 공학 프로젝트 아이디어
폭탄 탐지 용 로봇
이 로봇은 각 장소에서 폭탄을 감지하는 데 사용됩니다. 이 로봇은 PC를 이용한 무선 RF를 통해 사람이 조작 할 수 있습니다. 로봇이 폭탄을 감지하면 부저음이 울리고 폭탄의 파괴 물질이 변경되어 주변에 심각한 피해를 입힐 수 있습니다. 이를 위해 제안 된 시스템에 금속 검출기 회로가 포함되어 있습니다.
리모컨을 통해 제어되는 로봇 팔
이 프로젝트는 리모컨을 통해 제어하는 로봇 팔을 구현합니다. 이 로봇은 시간을 단축하여 다양한 산업 분야에서 인간의 노력을 줄여줍니다. 이 로봇은 리모컨을 통해 제어되는 특정 작업에 사용됩니다. 여기에서이 로봇은 특정 작업을 위해 사전 프로그래밍되어 있습니다. 이 프로젝트는 리모컨을 사용하여 로봇 팔을 제어합니다. 송신기에서 수신되는 적외선 신호는 기본 포토 다이오드를 사용하는 IR 수신기를 통해 감지 할 수 있습니다.
원격 비행 로봇을 이용한 GSM 무인 Arial 촬영
이 프로젝트는 인간의 이미지를 캡처하여 방어를 위해 오디오 및 비디오를 통해 무선으로 개인용 컴퓨터로 전송하는 데 사용됩니다. 이 시스템은 센서를 이용한 감시 작업에 적합한 경량의 시스템을 설계합니다.
센서는 아래의 균형 잡힌 영역을 이미징하기 위해 최소 30m 높이에서 2 분 이상 높이를 유지해야합니다.
인식 가능한 비디오 정보는 관찰 영역에 올바르게 위치한 지상의 수신기 지점으로 전송되어야합니다. 사용되는 센서는 위에서 언급 한 조건에서 물체를 인식 할 수 있어야합니다. 이 시스템의 구성에는 센서, 관찰, 데이터 링크, 데이터 처리 메커니즘 및 지원 시스템이 포함됩니다.
광학 Odometry를 사용한 로봇 탐색
이 프로젝트는 Optical Odometry를 사용한 탐색 용 로봇을 설계합니다. 자율 이동 로봇이 직면 한 주요 문제는 주변에서 안전하고 일관되게 길을 찾는 능력입니다.
무선 무인 탱커 로봇
이 프로젝트는 로봇 차량에 사용되는 제어 시스템을 설계하여 RF 및 PC를 통해 제어 할 수 있습니다. 이 제안 된 시스템에서는 적외선 센서에서 제공된 피드백을 기반으로 로봇의 제어를 수행 할 수 있습니다. 이 센서는 물체 감지 회로의 필수 부분입니다.
Swarm 로봇
이 로봇은 여러 로봇을 사용하는 인공 무리 지능과 함께 작동합니다. 이 로봇은 작업을 완료하기 위해 서로 협력합니다. 이 로봇의 통신은 무선으로 수행 될 수 있으며 그에 따라 진행됩니다. 이 프로젝트에서 두 로봇은 하나의 OS 마스터와 다른 하나는 슬레이브처럼 설계되었지만이 두 로봇 간의 통신은 서로 무선으로 수행 될 수 있습니다. 여기서 마스터 로봇은 미션을 수행하면서 슬레이브 로봇을 제어하는 데 사용되는 반면, 고약 로봇은 마스터 로봇으로부터 수신 된 신호에 따라 작동합니다.
청소 로봇
이 프로젝트는 집을 깨끗하고 빛나게 유지하기 위해 로봇, 즉 청소 로봇을 설계합니다. 이 로봇을 사용하면 스마트 폰으로 버튼을 눌러 집안의 바닥, 벽 청소를 아주 쉽게 할 수 있습니다.
디플로마 및 엔지니어링 학생을위한 로봇 공학 프로젝트 아이디어
로봇 공학 분야에서는 로봇의 설계, 운영, 시공, 구조적 배치, 제조 및 적용을 다루는 것이 중요합니다. 컴퓨터 기술을 사용하여 적절한 하드웨어 및 센서를 사용하여 제어, 감각 피드백 및 정보 처리 작업을 수행 할 수 있습니다. 적절한 프로그램과 함께 전용 마이크로 컨트롤러를 통해 제어되는 로봇 공학에 많은 모터가 사용됩니다. 따라서 조립 및 'C'에 대한 언어 지식은 로봇 애플리케이션을 설계하는 데 필수적입니다.
요즘 많은 공대생들이 로봇 공학 프로젝트에 많은 관심을 보이고 있으며 다른 학생들에 비해 많은 관심을 불러 일으 킵니다. 라인 따라 가기, 픽 앤 플레이스, 소방, 벽 트랙, 헥사 포드, 휴머노이드 등과 같은 로봇은 학업 수준에서 인기있는 프로젝트는 거의 없습니다.
마지막 해 공학 학생들을위한 최신 로봇 공학 프로젝트 아이디어가 여기에 나열되어 있습니다.
- 초음파 장애물 감지 로봇 차량
- 휴대 전화로 로봇 차량 이동
- TV 리모컨으로 작동하는 로봇 차량
- 가속도계 (자이로 스코프) 제어 로봇
- 무선 주파수 (RF) 제어 무선 로봇
- 스피커 식별 기술이 적용된 음성 작동 로봇
- 컴퓨터 제어 Pic and Place 로봇 (유선 또는 무선)
- 야간 투시 기능이있는 무선 비디오 및 음성 전송 기능이있는 Zigbee 제어 보트
- 장애물 감지를위한 인공 비전이있는 자율 로봇
- 무선 제어 기능이있는 연기 및 LPG 가스 감지 로봇
- 가시광 추종자 로봇
- 안드로이드 휴대폰 제어 블루투스 로봇
- 야간 무선 카메라가 장착 된 무선으로 작동되는 전쟁 현장 감시 로봇
- 비디오 카메라 감시 시스템을 갖춘 플라잉 쿼드 로터 헬기 건설
- 디지털 나침반 및 GPS 기반자가 항행 로봇
- 폭탄 탐지 로봇
- 해양 연구 애플리케이션을위한 DTMF 기반의 무인 로봇 보트 제어
- 안드로이드 스마트 폰으로 제어되는 와이파이 로봇
- 비디오 비전이있는 무선 실내 청정기 스프레이 로봇
- DTMF 기반 휴대폰 제어 로봇
- 무선 비디오 카메라로 비행하는 쿼드 로봇 헬기
- GPS 및 Digital Compassed 기반자가 항행 로봇
- 무선 비디오 카메라로 제어되는 PC / 노트북 형태의 폭탄 이동 로봇
- GSM (SMS) 휴대 전화 제어 지능형 로봇
- 감시 시스템 용 무선 음성 및 영상 전송 로봇
- 적외선 추적 로봇 (TV 원격 제어)
- 살아있는 인간 탐지 및 경고 로봇
- MEMS (Micro Electro Mechanical Sensor) 가속도계 / 자이로 스코프 기반 자체 균형 로봇
- 휴대폰 블루투스 작동 로봇
- 속도 및 방향 제어 기능이있는 휴대 전화로 제어되는 4 족 보행 로봇
- 기계식 감지 스위치가있는 장애물 감지 로봇
- 초음파 센서가있는 장애물 감지 로봇
- PC 제어 유선 로봇
- 심은 지뢰를 감지하여 경고하는 무선 작동 전쟁터 랜드 로버
- 강력한 음성 인식을 사용하는 인간-로봇 인터페이스
- PC 제어 무선 다목적 로봇
- 워터 제트 스프레이가있는 무선 작동 식 소화기 로봇
- 원격 제어 랜드 로버
- 로봇 제어 무선 오디오-비디오 스트리밍 카메라
- 서보 모터 제어 무선 비디오 카메라 제어 시스템
- 벽 추종자 로봇
- 음성 제어 무선 엘리베이터 시스템
- 초음파 장애물 회피 시스템을 갖춘 음성 인식 로봇
- 터치 스크린 제어 지능형 로봇
- 음성으로 작동되는 지능형 소화기 차량
다양한 정보를 더 얻으십시오. 공학 학생을위한 마이크로 컨트롤러 기반 로봇 프로젝트 .
따라서 이것은 Arduino, Mini, Arm 프로젝트 아이디어, 미래에 대한 아이디어 등과 같은 다양한 분야의 디플로마 및 엔지니어링 학생들을위한 Robotics Project Ideas 목록에 관한 것입니다. 이들은 마지막 학년 엔지니어링 학생들을위한 흥미로운 최신 Robotics Project Ideas입니다. . 에서 학문적 수준의 로봇 공학 마이크로 컨트롤러를 사용하는 프로젝트 또는 로봇 키트는 매우 유명합니다. 따라서 이러한 로봇 프로젝트는 학생들에게 큰 도움이 될 것입니다. 이 외에도 이러한 프로젝트 또는 초보자를위한 간단한 로봇 프로젝트 아래 댓글 섹션에 댓글을 달아 소중한 제안을 할 수 있습니다.