
소개:
오늘날 많은 산업에서 높은 수준의 성능과 신뢰성으로 인해 로봇을 사용하고 있으며 이는 인간에게 큰 도움이됩니다. 장애물 회피 로봇은 장애물을 감지하고 충돌을 피하는 데 사용됩니다. 이것은 자율 로봇입니다. 장애물 회피 로봇의 설계에는 작업에 따라 많은 센서가 통합되어야합니다.
장애물 감지는이 자율 로봇의 주요 요구 사항입니다. 로봇은 로봇에 장착 된 센서를 통해 주변 영역에서 정보를 가져옵니다. 범프 센서, 적외선 센서, 초음파 센서 등과 같이 장애물 감지에 사용되는 일부 감지 장치입니다. 초음파 센서는 장애물 감지에 가장 적합하며 저가이며 높은 범위 기능을 가지고 있습니다.

장애물 회피 로봇 차량
작동 원리:
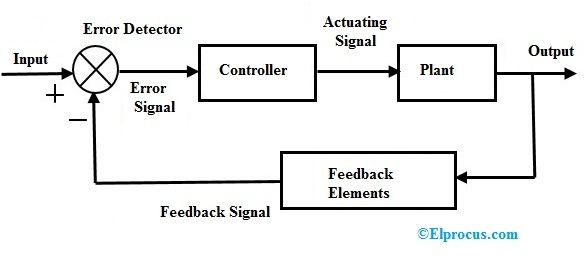
장애물 회피 로봇 차량 움직임에 초음파 센서를 사용합니다. 8051 제품군의 마이크로 컨트롤러는 원하는 작동을 달성하는 데 사용됩니다. 모터는 모터 드라이버 IC를 통해 마이크로 컨트롤러에 연결됩니다. 초음파 센서는 로봇 앞에 부착됩니다.
로봇이 원하는 경로로 이동할 때마다 초음파 센서는 센서 헤드에서 지속적으로 초음파를 전송합니다. 장애물이 앞에 올 때마다 초음파가 물체에서 반사되어 그 정보가 마이크로 컨트롤러로 전달됩니다. 마이크로 컨트롤러는 초음파 신호를 기반으로 모터를 왼쪽, 오른쪽, 뒤쪽, 앞쪽으로 제어합니다. 각 모터의 속도를 제어하기 위해 펄스 폭 변조 (PWM)가 사용됩니다.

블록 다이어그램 장애물 회피 로봇 차량
장애물 회피 로봇 차량에 사용되는 다양한 센서
1. 장애물 감지 (IR 센서) :
IR 센서는 장애물 감지에 사용되며 센서 출력 신호는 마이크로 컨트롤러로 전송됩니다. 마이크로 컨트롤러는 차량에 장착 된 DC 모터를 사용하여 차량 (전진 / 후진 / 정지)을 제어합니다. 인라인에 장애물이 있으면 IR 센서가 광선을 수신하지 못하고 마이크로 컨트롤러에 신호를 보냅니다. 마이크로 컨트롤러가 즉시 차량을 멈추고 사이렌이 켜집니다. 1 분 후 장애물이 제거되면 로봇이 경로 상태를 확인합니다. 로봇이 먼 단어로 이동하지 않으면 로봇이 시작 위치로 돌아갑니다. 센서는 짧은 초음파 폭발을 방출 한 다음 에코를 청취하여 물체를 감지합니다. 호스트 마이크로 컨트롤러의 제어하에 센서는 짧은 40kHz 폭발을 방출합니다. 이 폭발은 벤처 또는 공기를 통해 이동하여 물품에 부딪 히고 그 후 다시 센서로 튕 깁니다. 센서는 에코가 감지되면 종료되는 출력 펄스를 호스트에 제공하므로 한 펄스에서 다음 펄스까지의 폭이 프로그램에 의해 계산되어 물체의 거리에 대한 결과를 제공합니다.
두. 경로 감지 (근접 센서) :
정상적인 원인은 가이드 라인을 제공하는 두 센서와 로봇이 경로를 똑바로 따라갑니다. 그 때 라인이 끝나면 로봇은 180에서 반전하고 같은 위치로 돌아갑니다.

온라인 상태
근접 센서는 경로 감지에 사용됩니다. 곡선 선에서 오른쪽 센서가 감지되지 않으면 마이크로 컨트롤러가 왼쪽 모터를 활성화하여 오른쪽 센서의 신호가 나올 때까지 왼쪽으로 돌립니다. 신호가 오른쪽 센서를 감지하면 두 모터가 활성화되어 앞으로 나아갑니다. 그 때 라인이 끝나면 로봇은 180에서 반전하고 같은 위치로 돌아갑니다.

줄을 잃다
삼. 초음파 센서 :
초음파 센서는 장애물 감지에 사용됩니다. 초음파 센서는 센서 헤드에서 초음파를 전송하고 다시 물체에서 반사 된 초음파를 수신합니다.
명령 경보 시스템, 자동 도어 오프너 등과 같은 초음파 센서를 사용하는 많은 응용 분야가 있습니다. 초음파 센서는 매우 콤팩트하고 성능이 매우 뛰어납니다.

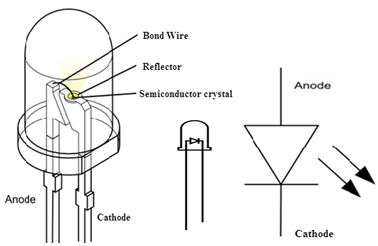
초음파 센서 일반 다이어그램
작동 원리:
초음파 센서는 단파 및 고주파 신호를 방출합니다. 이들은 소리의 속도로 공기 중에서 전파됩니다. 물체에 부딪히면 센서에 에코 신호를 반사합니다. 초음파 센서는베이스에 고정 된 멀티 바이브레이터로 구성됩니다. 멀티 바이브레이터는 공진기와 진동기의 조합입니다. 공진기는 진동에 의해 생성 된 초음파를 전달합니다. 초음파 센서는 40kHz 음파를 생성하는 이미 터와 감지기가 40kHz 음파를 감지하여 전기 신호를 마이크로 컨트롤러로 다시 보내는 두 부분으로 구성됩니다.

초음파 작동 원리
초음파 센서를 통해 로봇은 물체를 가상으로보고 인식하고 장애물을 피하고 거리를 측정 할 수 있습니다. 초음파 센서의 작동 범위는 10cm ~ 30cm입니다.
“인공 신경망의 종류 ”
초음파 센서의 작동 :
고전압의 전기 펄스가 초음파 변환기에 가해지면 특정 주파수 스펙트럼에 걸쳐 진동하고 폭발적인 음파를 생성합니다. 초음파 센서 앞에 장애물이있을 때마다 음파가 에코 형태로 반사되어 전기 펄스를 생성합니다. 음파를 보내고 에코를 수신하는 데 걸리는 시간을 계산합니다. 에코 패턴은 감지 된 신호의 상태를 확인하기 위해 음파 패턴과 비교됩니다.
노트 : 초음파 수신기는 송신 파가 물체에 닿는 동안 초음파 송신기의 신호를 감지해야합니다. 이 두 센서를 조합하면 로봇이 경로에있는 물체를 감지 할 수 있습니다. 초음파 센서는 로봇 앞에 부착되어 있으며이 센서는 로봇이 모든 건물의 복도를 탐색하는 데 도움이됩니다.
초음파 센서의 응용 :
- 교통 신호 자동 전환
- 침입자 경보 시스템
- 계수기 액세스 스위치 주차 미터기
- 자동차의 백 소나
초음파 센서의 특징 :
- 작고 가벼운
- 고감도 및 고압
- 높은 신뢰성
- 20mA의 전력 소비
- 펄스 인 / 아웃 통신
- 좁은 수용 각도
- 2cm ~ 3m 내에서 정확한 비접촉 분리 추정 제공
- 폭발 점 LED는 발전 예측을 보여줍니다.
- 3 핀 헤더로 서보 개발 링크를 사용하여 간편하게 연결할 수 있습니다.
장애물 회피 로봇 차량의 응용 :
- 특히 군사용
- 도시 전쟁에 사용할 수 있습니다.
이 주제 또는 전기 및 전자 프로젝트의 개념에 대한 추가 질문이 아래에 의견을 남기면 장애물 감지의 초음파 센서를 사용하는 로봇 차량의 개념에 대한 아이디어를 분명히 얻었습니다.
사진 크레딧 :
- 초음파 센서 일반 다이어그램 Letsmakerobots
- 초음파 센서 작동 원리 마이크로 소닉







{kind=link}