쿼드 콥터 원격 제어 회로는 시장이나 온라인 상점에서 매우 쉽게 구할 수 있지만 열렬한 전자 애호가는 이러한 기능이 실제로 어떻게 작동하는지, 집에서 만들 수 있는지 여부를 알 수 없습니다.
이 기사에서 우리는 간단한 쿼드 콥터 원격 제어 회로 복잡한 MCU 기반 회로를 사용하지 않고 개별 부품을 사용하고 RF 원격 제어 모듈을 사용합니다.
단계별 가이드는 실제로 관심있는 애호가들이 PWM 개념을 사용하여 쿼드 콥터를 제어 할 수있는 방법을 이해하게합니다.
우리는 이미 배웠습니다 쿼드 콥터 기초 이제 궁극적으로 장치를 원격으로 비행하는 데 도움이 될 원격 제어 섹션을 조사해 보겠습니다.
필요한 기본 모듈
프로젝트에 필요할 수있는 주요 성분은 다음과 같습니다.
기본적으로 다음 3 개의 회로 단계가 필요합니다.
1) 4 way RF 원격 제어 Tx, Rx 모듈-1set
2) IC 555 기반 PWM 발생기 회로-4nos
3) BLDC 모터 컨트롤러 회로-4nos
수제 버전이기 때문에 제안 된 디자인에 약간의 비 효율성을 예상 할 수 있습니다. 전문 단위.
휴대용 PWM 송신기 장치는 기본적으로 4 개의 개별 PWM 제어 회로와 통합 된 Tx 원격 모듈로 구성되며, 쿼드 콥터는 4 개의 개별 BLDC 드라이버 회로와 통합 된 1 개의 Rx 회로로 둘러싸여 야합니다.
쿼드 콥터 모터 회로부터 시작하여 BLDC 모터 컨트롤러를 Rx 회로와 함께 구성하고 연결하는 방법을 살펴 보겠습니다.
쿼드 콥터 PWM 수신기 회로
이전 게시물 중 하나에서 단일 칩을 사용하여 다목적 BLDC 모터 컨트롤러를 구축 할 수있는 방법을 배웠지 만이 디자인은 쿼드 콥터의 상대적으로 무거운 모터를 작동하도록 설계되지 않았으므로 현재 응용 프로그램에는 적합하지 않을 수 있습니다.
위의 회로에 대한 '빅 브라더'옵션은 다행히도 사용할 수 있으며 쿼드 콥터 모터 구동에 완벽하게 적합합니다. TEXAS INSTRUMENTS에게 이러한 멋진 단일 칩 애플리케이션 지정 회로 모듈을 제공해 주신 데 대해 감사드립니다.
이 고전류 BLDC 드라이버 IC에 대해 자세히 알아 보려면 다음 pdf 데이터 시트를 참조하십시오.
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
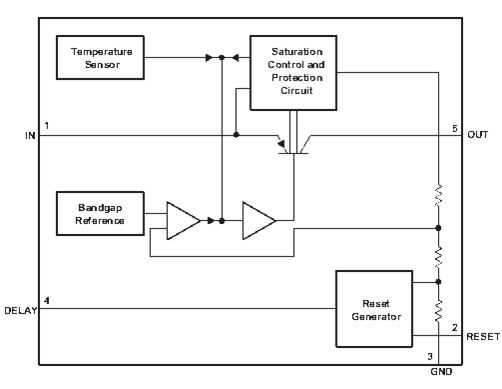
아래 설정은 과부하 보호, 열 보호 등과 같은 모든 필수 보호 기능으로 구성된 자체 포함 저 전류 BLDC 모터 회로 인 DRV11873 IC를 사용하는 쿼드 콥터 모터 드라이버 컨트롤러의 전체 회로도를 보여줍니다.이 모듈은 기본적으로 ESC를 구성합니다. 현재의 쿼드 콥터 유닛을 위해.
이 설계 및 PCB 세부 사항에 대한 자세한 내용은 아래 원본 문서를 참조하십시오.
http://www.ti.com/lit/ds/symlink/drv11873.pdf

작동 원리
IC의 FS 및 FG 핀아웃은 외부 회로를 통해 제어를 추가하여 IC를 향상시키기위한 것입니다. 우리가 설계에서 이러한 기능을 사용하지 않기 때문에 이러한 핀은 사용되지 않고 100K 저항을 통해 양극 라인으로 종단 될 수 있습니다.
IC의 RD 핀아웃은 모터의 회전 방향을 결정합니다. 100K 저항을 통해이 핀을 Vcc에 연결하면 모터를 시계 반대 방향으로 회전하고 연결하지 않은 상태로두면 반대 방향으로 모터가 시계 방향으로 회전 할 수 있습니다.
핀 # 16은 PWM 입력이 외부 소스에서 PWM 입력을 주입하는 데 사용되며 PWM의 듀티 사이클을 변경하면 모터의 속도가 그에 따라 변경됩니다.
FR, CS 핀아웃도 출력 요구와 무관하므로 다이어그램에 표시된대로 사용하지 않고 100K 저항을 통해 양의 라인으로 종단 될 수 있습니다.
U, V, W 핀아웃은 각 쿼드 콥터 BLDC 3 상 모터에 연결해야하는 모터 출력입니다.
COM 핀아웃은 3 상 모터의 공통 와이어를 연결하기위한 것입니다. 모터에 공통 와이어가없는 경우 2k2 저항의 3 개 번호를 U, W, W 핀에 연결 한 다음 공통 와이어를 연결하여 간단히 시뮬레이션 할 수 있습니다. IC의 COM 핀으로 끝납니다.
회로도는 또한 PWM 불안정 회로 모드로 구성된 IC 555를 보여줍니다. 이것은 회로 모듈의 일부가되고 핀 # 7의 PWM 출력은 DRV IC 회로의 PWM 입력과 연결되어 일정한 기본 속도로 4 개의 모터를 시작하고 모터가 일정한 호버링을 할 수 있도록합니다. 주어진 지점에서 속도.
이것으로 쿼드 콥터 설계를위한 메인 ELC 회로 또는 BLDC 드라이버 회로를 마칩니다.
쿼드 콥터 설계에서 모터 4 개에 대해 이러한 모듈 4 개가 필요합니다.
즉, IC 555 PWM 스테이지와 함께 4 개의 DRV IC가 쿼드 콥터의 4 개 모터 각각에 연결되어야합니다.
이러한 모듈은 각각의 관련 DRV 컨트롤러 IC에 고정 된 동일한 PWM 신호를 적용하여 일반적으로 4 개의 모터가 모두 미리 정해진 속도로 설정되도록합니다.
이제 일반 4 채널 원격 제어 핸드셋을 사용하여 개별 모터의 속도를 변경하기 위해 원격 제어를 통해 PWM을 변경하는 방법을 알아 보겠습니다.
RF 수신기 모듈 (PWM 디코더)

위의 회로는 사용자의 원격 송신기 핸드셋에서 외부 무선 PWM 데이터를 수신하기 위해 쿼드 콥터 내부에 수용되어야하는 수신기 원격 RF 회로를 보여주고, 다음에 설명 된대로 함께 제공되는 DRV 컨트롤러 모듈에 공급하기 위해 신호를 적절하게 처리합니다. 이전 섹션.
PWM # 1… .PWM # 4로 명명 된 4 개의 출력은 이전 다이어그램에 표시된대로 DRV IC의 PWM 핀 # 15에 연결되어야합니다.
RF 수신기의 이러한 PWM 핀아웃은 사용자가 송신기 핸드셋에서 해당 버튼을 누를 때마다 활성화됩니다.
RF 송신기의 배선 방법 (PWM 인코더)
위 섹션에서는 Rx 또는 원격 수신기 회로와 4 개의 출력을 쿼드 콥터 모터 ESC 드라이버 모듈과 연결하는 방법에 대해 설명했습니다.
여기에서는 PWM 데이터를 쿼드 콥터 수신기 장치에 무선으로 전송하기 위해 간단한 RF 송신기를 생성하고 PWM 회로와 연결하여 개별 모터의 속도를 버튼 하나만 눌러 간단히 제어하여 궁극적으로 사용자 기본 설정에 따라 방향 또는 속도를 변경하는 쿼드 콥터.

위에 표시된 회로는 송신기 모듈의 배선 세부 사항을 보여줍니다. 아이디어는 매우 간단 해 보이며, 메인 송신기 회로는 인코딩 된 PWM 신호를 대기로 전송하는 TSW434 칩과 인코딩 된 신호를 TSW 칩에 공급하는 HT12E로 구성됩니다.
PWM 신호는 4 개의 개별 IC 555 회로 단에 의해 생성되며, 이는 앞서 DRV 컨트롤러 모듈에서 논의한 것과 동일 할 수 있습니다.
4 개의 IC의 PWM 내용은 SW1 ---- SW4로 표시된 4 개의 개별 푸시 버튼을 통해 인코더 IC HT12E의 각 핀아웃에서 종료 된 것을 볼 수 있습니다.
이러한 각 버튼은 앞에서 논의하고 PWM # 1, PWM # 2… ..PWM # 4로 표시된 수신기 모듈의 동일한 핀아웃에 대응하고 토글합니다.
SW1을 누르면 수신기 장치의 PWM # 1 출력이 활성화되고 핀아웃이 수신 된 디코딩 된 PWM 신호를 송신기에서 관련 DRV 모듈로 공급하기 시작하고 그에 따라 관련 모터가 그에 따라 속도를 변경하게됩니다.
마찬가지로 SW2,3,4를 눌러 사용자가 원하는대로 다른 3 개의 쿼드 콥터 모터의 속도에 영향을 줄 수 있습니다.
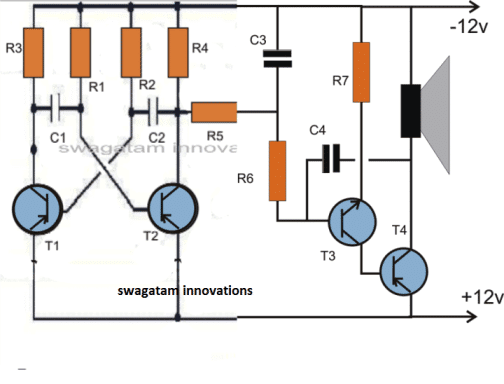
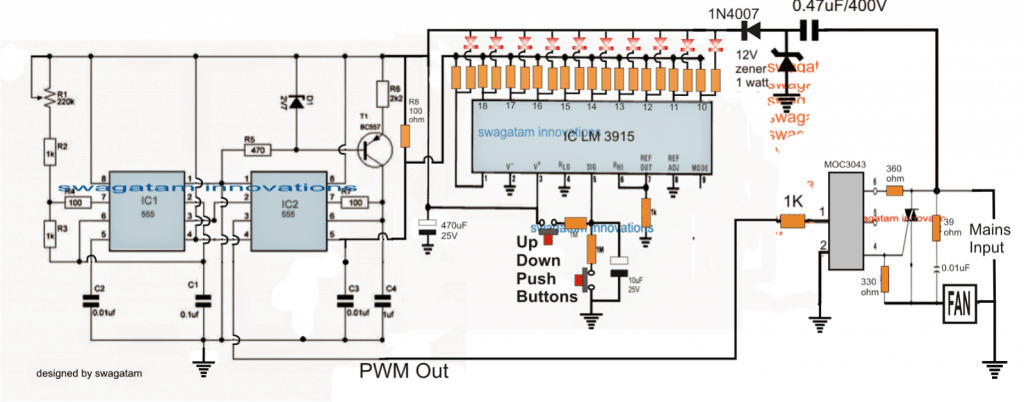
IC 555 PWM 회로
위의 RF 송신기 핸드셋에 표시된 4 개의 PWM 회로는 DRV 컨트롤러 ESC 회로에서 본 것과 똑같은 다음 다이어그램을 참조하여 구축 할 수 있습니다.

5K 팟은 일반적인 팟의 형태 일 수 있으며이 팟은 해당 모터에서 다른 속도를 선택하는 버튼과 함께 추가로 사용할 수 있습니다.
선택한 버튼을 누른 상태에서 해당 5KPWMpot을 동시에 움직이면 쿼드 콥터가 의도 한 방향으로 속도를 높이거나 낮출 수 있습니다.
또는 PWM을 처음에 더 높거나 낮은 수준으로 설정 한 다음 해당 버튼을 눌러 해당 쿼드 콥터 모터가 PWM 설정에 따라 원하는 속도를 얻을 수 있도록 할 수 있습니다.
쿼드 콥터 모터 사양
위에서 설명한 Qiadcopter 원격 제어 회로는 디스플레이 용도로만 사용되며 짐이나 카메라를 들어 올리는 데 사용할 수 없습니다. 이는 설계에 사용되는 모터가 바람직하게는 저 전류 유형이어야 함을 의미합니다.
DRV11873 IC는 정격 15V, 1.5A 또는 약 20W 모터를 작동하도록 설계되었으므로 15 ~ 30W 정격의 모든 3 상 BLDC 모터를 사용할 수 있습니다.
이 쿼드 콥터 설계 용 배터리는 1.5A 연속 전류에서 15V 피크를 공급할 수있는 12v Lipo pr 리튬 이온 배터리 일 수 있습니다.
사양 세부 정보
1306N 브러시리스 아웃 러너 미니어처 DC 모터
유형 : 마이크로 모터
구성 : 영구 자석
정류 : 브러시리스
속도 (RPM) : 2200rpm / v
연속 전류 (A) : 1.5 ~ 2.6A
전압 (V) : 7.4 ~ 11.1V
소형 DC 모터 : AX-1306N
무게 : 8g
샤프트 직경 : 1.5mm
배터리 LI-PO : 2-3 초
동작 전류 : 1.5 ~ 2.6A
최대 효율 : 67 %

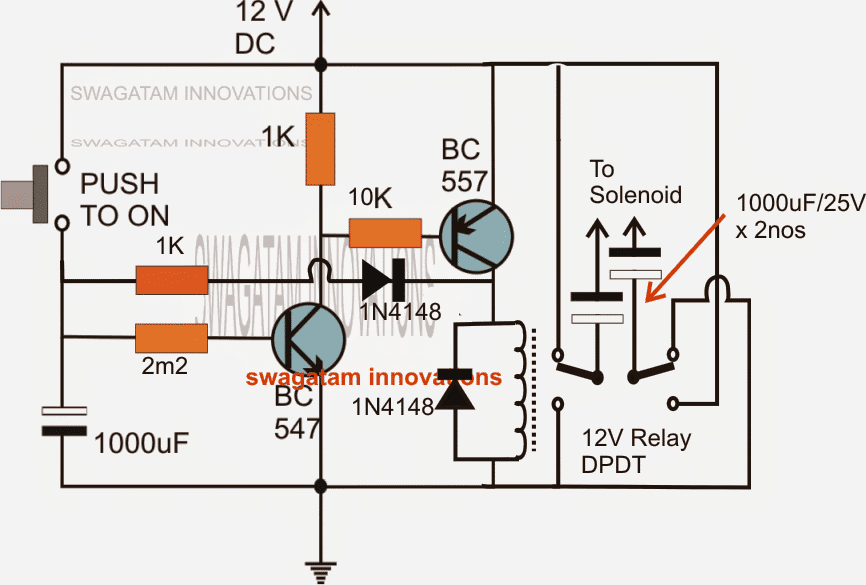
이전 : 센서리스 BLDC 모터 드라이버 회로 Next : 푸시 버튼을 사용하는 히터 컨트롤러 회로