이 게시물에서는 작동 사양에 영향을주지 않고 AC 모터 속도를 제어하기위한 단상 가변 주파수 드라이브 회로 또는 VFD 회로에 대해 설명합니다.
VFD 란?
모터 및 기타 유사한 유도 성 부하는 특히 제조 사양에 속하지 않을 수있는 주파수로 작동하는 것을 '좋아하지'않으며 이러한 비정상적인 조건에서 강제로 사용하면 비효율적 인 경향이 있습니다.
예를 들어 60Hz로 작동하도록 지정된 모터는 50Hz 또는 기타 범위의 주파수에서 작동하지 않는 것이 좋습니다.
그렇게하면 모터의 가열, 필요한 속도보다 낮거나 높은 속도, 비정상적으로 높은 소비와 같은 바람직하지 않은 결과가 발생할 수 있으므로 매우 비효율적이며 연결된 장치의 수명 저하가 줄어 듭니다.
그러나 다른 입력 주파수 조건에서 모터를 작동하는 것은 종종 강제가되고 이러한 상황에서는 VFD 또는 가변 주파수 드라이브 회로가 매우 편리해질 수 있습니다.
VFD는 모터 사양에 따라 입력 전원의 주파수와 전압을 조정하여 사용자가 AC 모터의 속도를 제어 할 수있는 장치입니다.
이는 또한 VFD를 사용하면 모터 사양에 따라 VFD 주파수 및 전압을 적절하게 사용자 정의하여 전압 및 주파수 사양에 관계없이 사용 가능한 그리드 AC 전원을 통해 모든 AC 모터를 작동 할 수 있음을 의미합니다.
이것은 일반적으로 다른 주파수 교정으로 조정 된 가변 노브의 형태로 주어진 컨트롤을 사용하여 수행됩니다.
집에서 VFD를 만드는 것은 어려운 제안으로 들릴 수 있지만 아래에 제안 된 디자인을 살펴보면이 매우 유용한 장치 (제가 설계 한)를 만드는 것이 그리 어렵지 않음을 알 수 있습니다.
회로 작동
회로는 기본적으로 하프 브리지 드라이버 단계와 PWM 로직 생성기 단계의 두 단계로 나눌 수 있습니다.
하프 브리지 드라이버 스테이지는 각각 두 개의 하이 사이드 및 로우 사이드 MOSFET을 통합하는 고전압 모터 드라이브 스테이지를 한 손으로 처리하는 하프 브리지 드라이버 IC IR2110을 사용합니다.
따라서 드라이버 IC는 회로의 핵심을 형성하지만이 중요한 기능을 구현하기 위해 몇 가지 부품 만 필요합니다.
그러나 위의 IC는 원하는 특정 주파수에서 연결된 부하를 구동하기 위해 주파수에서 높은 로직과 낮은 로직이 필요합니다.
이러한 hi 및 lo 입력 논리 신호는 구동기 IC의 작동 데이터가되며 전원 AC와 위상이 일치하는 PWM뿐만 아니라 지정된 주파수를 결정하기위한 신호를 포함해야합니다.
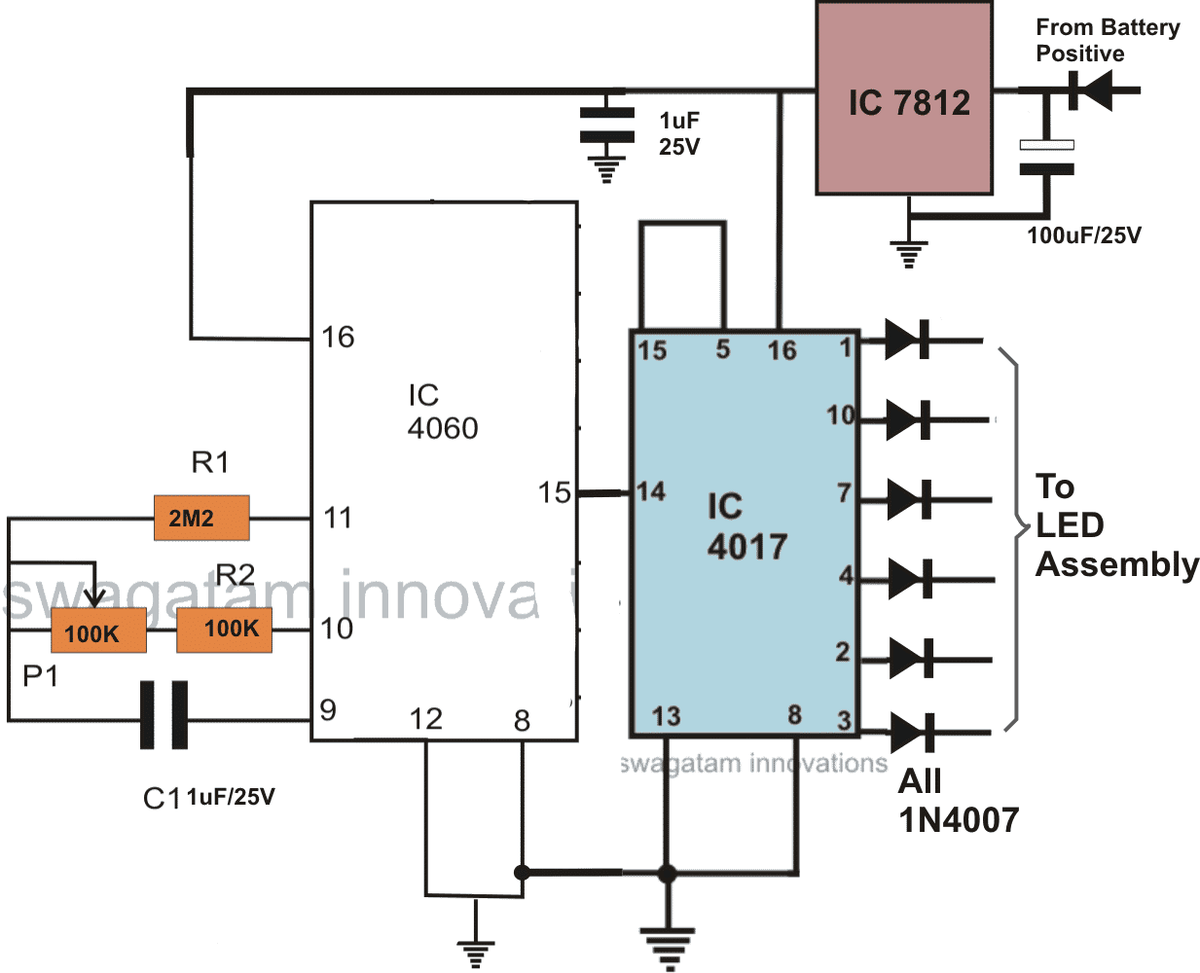
위의 정보는 2 개의 555 IC와 10 년 카운터로 구성된 또 다른 단계에서 생성됩니다. IC 4017.
두 개의 555 IC는 스텝 다운 브리지 정류기 출력에서 파생 된 전파 AC 샘플에 해당하는 수정 된 사인파 PWM을 생성합니다.
IC4017은 교번 주파수 속도가 회로의 MAIN 주파수 결정 매개 변수가되는 토템폴 출력 로직 생성기 역할을합니다.
이 결정 주파수는 IC1의 핀 # 3에서 뽑아 내고 IC2 트리거링 핀을 공급하고 IC2의 핀 # 3에서 수정 된 PWM을 생성합니다.
“단상 대 삼상 모터 ”
수정 된 사인파 PWM은 IR2110에 공급하기 전에 4017 IC의 출력에서 스캔되어 수정 된 PWM의 정확한 '인쇄'를 하프 브리지 드라이버의 출력과 궁극적으로 작동중인 모터에 중첩합니다.
모터에 대해 정확한 지정된 주파수를 제공하려면 Cx 및 180k 포트 값을 적절하게 선택하거나 조정해야합니다.
하이 사이드 MOSFET의 드레인에서 고전압도 적절하게 계산되어야하며 모터 사양에 따라 적절히 스텝 업 또는 스텝 다운 한 후 사용 가능한 주 전압 AC를 정류하여 도출해야합니다.
위의 설정은 특정 모터에 대한 정확한 헤르츠 당 볼트 (V / Hz)를 결정합니다.
두 단계의 공급 전압은 접지 연결과 동일하게 공통 라인으로 만들 수 있습니다.
TR1은 필요한 작동 공급 전압을 회로에 제공하는 스텝 다운 0-12V / 100mA 변압기입니다.
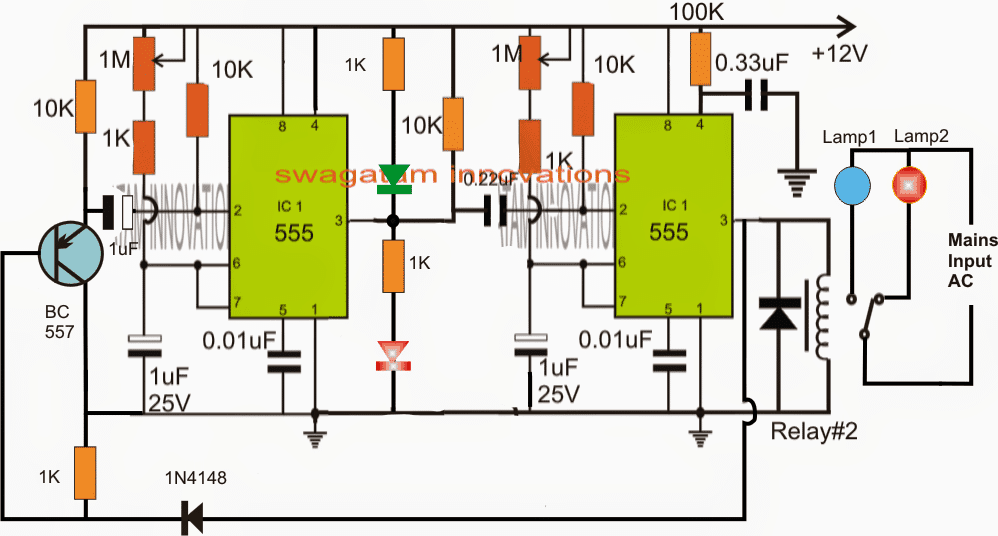
PWM 컨트롤러 회로

위 다이어그램의 IC 4017 출력을 다음 다이어그램의 HIN 및 LIN 입력에 적절하게 통합해야합니다. 또한 위 다이어그램에 표시된 1N4148 다이오드를 아래 다이어그램과 같이 로우 사이드 MOSFET 게이트와 연결하십시오.
풀 브리지 모터 드라이버

최신 정보:

위에서 설명한 간단한 단일 VFD 설계는 아래와 같이 자체 진동 풀 브리지 IC IRS2453을 사용하여 더욱 단순화하고 개선 할 수 있습니다.
풀 브리지 드라이버에 자체 발진기 스테이지가 장착되어 있으므로 IC 4017이 완전히 제거되어이 IC에 외부 트리거링이 필요하지 않습니다.
풀 브리지 설계이기 때문에 모터에 대한 출력 제어는 0에서 최대 속도 조정까지의 전체 범위를 갖습니다.
IC 2의 5 번 핀에있는 포트는 PWM 방식을 통해 모터의 속도와 토크를 제어하는 데 사용할 수 있습니다.
V / Hz 속도 제어의 경우 IRS2453과 연관된 Rt / Ct 및 IC1과 연관된 R1을 각각 조정 (수동)하여 적절한 결과를 얻을 수 있습니다.
더욱 단순화

풀 브리지 섹션이 압도적이라고 생각되면 아래와 같이 P, N-MOSFET 기반 풀 브리지 회로로 교체 할 수 있습니다. 이 가변 주파수 드라이버는 하이 측에 P 채널 MOSFET을 사용하고 로우 측에 N 채널 MOSFET을 사용하는 풀 브리지 드라이버 섹션을 제외하고는 동일한 개념을 사용합니다.
(높은 RDSon 등급으로 인해) P 채널 MOSFET의 사용으로 인해 구성이 비효율적으로 보일 수 있지만 많은 병렬 P-MOSFET를 사용하면 낮은 RDSon 문제를 해결하는 데 효과적인 접근 방식처럼 보일 수 있습니다.
여기서 3 개의 MOSFET이 P 채널 장치에 병렬로 사용되어 N 채널 대응 장치와 동등하게 장치의 발열을 최소화합니다.
Previous : MOSFET 보호 방법 – 기본 설명 Next : 태양 광 MPPT 애플리케이션 용 I / V 추적기 회로