PWM 회로를 사용하는 트라이 악 위상 제어는 시간 비례 형식을 사용하여 구현 된 경우에만 유용 할 수 있습니다. 그렇지 않으면 응답이 우연하고 비효율적 일 수 있습니다.
아래에 주어진 내 이전 기사 중 일부에서 :
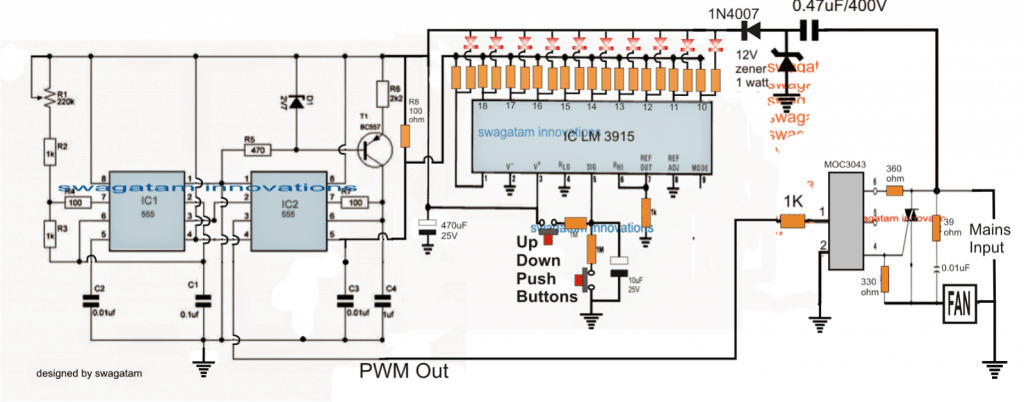
간단한 원격 제어 팬 레귤레이터 회로
디스플레이 회로가있는 푸시 버튼 팬 레귤레이터
LED 전구용 조광기 회로
트라이 악 위상 제어 회로를 시작하기 위해 PWM을 사용하는 것에 대해 논의했지만 설계에 시간 비례 기술이 포함되어 있지 않기 때문에 이러한 회로의 응답이 불규칙하고 비효율적 일 수 있습니다.
이 기사에서 우리는 시간 비례 이론을 사용하여 동일한 것을 수정하는 방법을 배워서 실행이 잘 계산 된 방식으로 훨씬 효율적으로 수행되도록합니다.
트라이 액 또는 사이리스터를 사용한 시간 비례 위상 제어 란 무엇입니까?
이 시스템은 계산 된 PWM 펄스 길이로 트라이 악이 트리거되어 PWM 펄스 위치 및 시간주기에 따라 결정된 주전원 50 / 60Hz 주파수의 특정 길이에 대해 트라이 악이 간헐적으로 전도되도록하는 시스템입니다.
트라이 악의 평균 전도 기간은 부하에 전력을 공급하거나 제어 할 수있는 평균 출력을 결정하고 필요한 부하 제어를 실행합니다.
예를 들어, 주전원 단계가 초당 50 사이클로 구성되어 있으므로 트라이 액이 1 사이클 ON 및 1 사이클 OFF 기간의 속도로 25 회 간헐적으로 작동하도록 트리거되면 부하가 다음과 같이 예상 될 수 있습니다. 50 % 전력으로 제어됩니다. 유사하게 다른 ON OFF 시간 비례는 부하에 상응하는 양의 더 높거나 더 낮은 전력 입력을 생성하기 위해 구현 될 수 있습니다.
시간 비례 위상 제어는 동기 모드와 비동기 모드의 두 가지 모드를 사용하여 구현됩니다. 여기서 동기 모드는 제로 크로싱에서만 트라이 악의 스위칭 ON을 의미하는 반면, 비동기 모드에서는 트라이 악이 제로 크로싱에서 특별히 전환되지 않고 오히려 즉각적으로 전환됩니다. 임의의 위치, 각 단계주기에서.
비동기 모드에서 프로세스는 상당한 수준의 RF를 유도 할 수 있지만, 이는 트라이 악의 제로 크로싱 스위칭으로 인해 동기 모드에서 상당히 감소되거나 없을 수 있습니다.
즉, 트라이 악이 제로 크로싱에서 특별히 켜지지 않고 임의의 피크 값에서 켜지면 대기에서 RF 잡음이 발생할 수 있으므로 항상 a를 사용하는 것이 좋습니다. RF 노이즈 제거를위한 제로 크로싱 스위칭 트라이 악 작업 중.
작동 원리
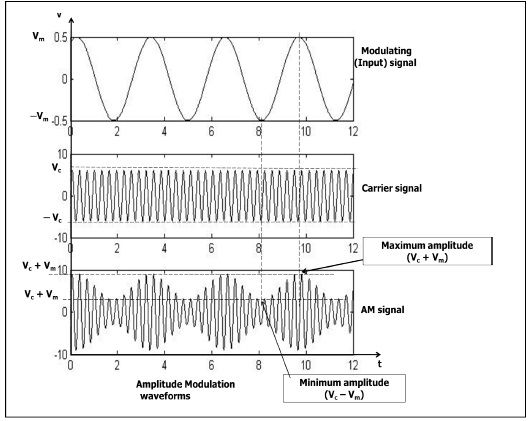
다음 그림은 시간에 따른 PWM을 사용하여 시간 비례 위상 제어를 실행하는 방법을 보여줍니다.

1) 위 그림의 첫 번째 파형은 중앙 제로 라인에 대해 정현파 상승 및 하강 330V 피크 포지티브 및 네거티브 펄스로 구성된 정상적인 50Hz AC 위상 신호를 보여줍니다. 이 중앙 제로 라인은 AC 위상 신호에 대한 제로 크로싱 라인이라고합니다.
트라이 악은 게이트 DC 트리거가 중단없이 연속적인 경우 표시된 신호를 지속적으로 전도 할 것으로 예상 할 수 있습니다.
2) 두 번째 그림은 위상 사이클의 모든 교번하는 양의 제로 크로싱에서 게이트 트리거 (빨간색으로 표시된 PWM)에 대한 응답으로 양의 절반 사이클 동안에 만 트라이 액이 강제로 전도되도록 할 수있는 방법을 보여줍니다. .
3) 세 번째 그림은 펄스가 AC 위상의 모든 음의 제로 크로싱에서 교대로 생성되도록 시간이 설정되는 동일한 응답을 보여줍니다. 이는 트라이 악 및 부하에 대해 50 % 위상 제어를 가능하게합니다.
그러나 서로 다른 계산 된 제로 크로싱 노드에서 이러한 타이밍 PWM을 생성하는 것은 어렵고 복잡 할 수 있으므로 원하는 위상 제어 비율을 획득하기위한 쉬운 접근 방식은 위의 4 번째 그림에 표시된대로 타이밍 펄스 트레인을 사용하는 것입니다.
4)이 그림에서 4 개의 PWM 버스트는 매 번갈아 가며 위상주기마다 볼 수 있으며, 이는 트라이 악 작동이 약 30 % 감소하고 연결된 부하에 대해서도 동일합니다.
여기서는 첫 번째 펄스 이후 트라이 악이 래치되어 중간 3 개의 펄스가 트라이 악에 영향을 미치지 않고 트라이 악이 다음 0이 될 때까지 계속 전도하기 때문에 여기에서 중간 3 개의 펄스가 쓸모 없거나 비효율적 인 펄스라는 사실을 알아 차릴 수 있습니다. 후속 5 번째 (마지막) 펄스에 의해 트리거되는 지점을 교차하여 트라이 액이 다음 음의 사이클 동안 ON으로 래치되도록합니다. 이 후 다음 제로 크로싱에 도달하자마자 더 이상의 PWM이 없으면 트라이 액이 전도되는 것을 막고 다음 제로 크로싱에서 다음 펄스가 발생할 때까지 차단되고 트라이 악 및 위상 제어 작업에 대한 프로세스를 반복합니다. .
이러한 방식으로 트라이 악 게이트에 대해 다른 시간 비례 PWM 펄스 트레인을 생성 할 수 있으므로 선호도에 따라 다양한 위상 제어 측정을 구현할 수 있습니다.
다음 기사 중 하나에서는 시간 비례 PWM 회로를 사용하여 위에서 설명한 트라이 악 위상 제어를 달성하기위한 실제 회로에 대해 알아 봅니다.
이전 : Arduino를 사용하는 RFID 리더 회로 다음 : RFID 보안 잠금 회로 – 전체 프로그램 코드 및 테스트 세부 정보