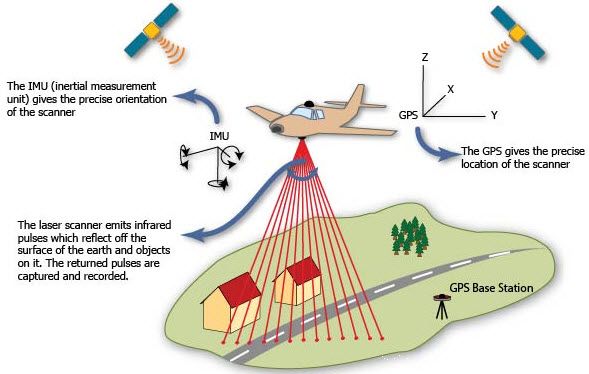
우리는 전 세계의 다양한 물체를 관찰 할 수 있습니다. 마찬가지로, 레이더와 같은 무선 감지 및 거리 측정은 조종사가 이동하는 위치를 알 수 없기 때문에 안개를 통해 비행하는 동안 조종사를 지원하는 데 사용됩니다. 비행기에 사용되는 레이더는 빛 대신 전파로 작동하는 횃불과 유사합니다. 비행기는 깜빡이는 레이더 신호를 전송하고 근처 물체의 신호를 수신합니다. 일단 표시가 발견되면 비행기는 무언가가 가까이 있음을 식별하고 표시가 도달하는 데 걸리는 시간을 사용하여 얼마나 멀리 떨어져 있는지 알아냅니다. 이 기사에서는 Radar의 개요 및 작동에 대해 설명합니다.
누가 레이더를 발명 했습니까?
여러 발명품과 마찬가지로 레이더 시스템은 속성에 대한 초기 작업의 결과이기 때문에 개인에게 신용을 부여하기가 쉽지 않습니다. 전자기 수많은 전자 장치의 접근성을위한 방사선. 주요 관심사는 제 2 차 세계 대전 초기에 여러 국가에서 라디오 위치 기술을 조사한 군사적 사생활의 은폐로 인해 더욱 복잡해졌습니다.
이 리뷰 작성자는 마침내 레이더 시스템이 직접 생성의 명확한 사례 일 때 50 년 전에 즉시 발표 된 Aircraft의 Detection & Location of by Radio Methods에 대한 Robert Watson-Watt의 메모를 결론지었습니다. 그래서이 분야에서 가장 중요한 독방 출판물이었습니다. 영국 전투에서 영국의 업적은 운영 가능성과 함께 기술적 성장을 포함하는 레이더 시스템의 확장에 많은 것을 할당했습니다.
레이더 시스템이란?
RADAR는 라디오 감지 및 범위 시스템. 기본적으로 RADAR가 배치 된 지점에서 물체의 위치와 거리를 감지하는 데 사용되는 전자기 시스템입니다. 공간으로 에너지를 방출하고 물체의 에코 또는 반사 신호를 모니터링하여 작동합니다. UHF 및 마이크로파 범위에서 작동합니다.
레이더는 전자기 센서로, 특정 거리에있는 다양한 물체를 감지, 추적, 위치 파악 및 식별하는 데 사용됩니다. 레이더의 작동은 대상 방향으로 전자기 에너지를 전송하여 에코를 관찰하고 다시 돌아 오는 것입니다. 여기서 표적은 배, 항공기, 천체, 자동차, 우주선, 비, 새, 곤충 등일뿐입니다. 표적의 위치와 속도를 알아 차리지 않고 때때로 모양과 크기를 알아냅니다.
적외선 및 광학 감지 장치와 비교하여 레이더의 주요 목표는 어려운 기후 조건에서 멀리 떨어진 대상을 발견하고 정밀도를 통해 거리, 범위를 결정하는 것입니다. 레이더에는 표적을 배치하기위한 조명 소스로 알려진 자체 송신기가 있습니다. 일반적으로 주파수가 400MHz에서 40GHz로 확장 될 때 헤르츠로 계산되는 전자기 스펙트럼의 마이크로파 영역에서 작동합니다. 레이더에 사용되는 필수 구성 요소
레이더는 군대의 요구 사항에 도달하기 위해 1930 ~ 40 년대에 빠르게 개발되었습니다. 여러 기술이 발전한 곳에서는 여전히 군대를 통해 널리 사용되고 있습니다. 동시에 레이더는 특히 항공 교통 제어, 날씨 관찰, 선박 탐색, 환경, 원격 지역에서의 감지, 행성 관찰, 산업 응용 분야에서의 속도 측정, 우주 감시, 법 집행 등의 민간 응용 분야에서도 활용됩니다.
작동 원리
그만큼 레이더 작동 원리 전자기력을 전달하고 대상으로 되돌아온 에너지를 검사하기 때문에 매우 간단합니다. 반환 된 신호가 소스 위치에서 다시 수신되면 전송 방식에 장애물이있는 것입니다. 이것이 레이더의 작동 원리입니다.
레이더의 기초
RADAR 시스템은 일반적으로 안테나에 의해 우주로 방사되는 전자기 신호를 생성하는 송신기로 구성됩니다. 이 신호가 물체에 닿으면 여러 방향으로 반사되거나 반사됩니다. 이 반사 또는 에코 신호는 수신기로 전달하는 레이더 안테나에 의해 수신되며, 여기서 처리되어 물체의 지리적 통계를 결정합니다.
범위는 신호가 RADAR에서 목표물로 이동하는 데 걸린 시간을 계산하여 결정됩니다. 대상의 위치는 안테나가 가리키는 최대 진폭 에코 신호의 방향에서 각도로 측정됩니다. 움직이는 물체의 범위와 위치를 측정하기 위해 도플러 효과가 사용됩니다.
이 시스템의 필수 부분은 다음과 같습니다.
- 송신기 : Klystron, Traveling Wave Tube와 같은 전력 증폭기 또는 Magnetron과 같은 전력 발진기 일 수 있습니다. 신호는 먼저 파형 발생기를 사용하여 생성 된 다음 전력 증폭기에서 증폭됩니다.
- 도파관 : 도파관은 RADAR 신호를 전송하기위한 전송 라인입니다.
- 안테나: 사용 된 안테나는 포물선 형 반사기, 평면 배열 또는 전자적으로 조정 된 위상 배열 일 수 있습니다.
- 듀플렉서 : 듀플렉서는 안테나를 송신기 또는 수신기로 사용할 수 있습니다. 송신기가 작동 할 때 수신기에 대한 입력에서 단락을 생성하는 기체 장치 일 수 있습니다.
- 리시버: 수퍼 헤테로 다인 수신기 또는 신호를 처리하고 감지하는 프로세서로 구성된 다른 수신기 일 수 있습니다.
- 임계 값 결정 : 수신기의 출력을 임계 값과 비교하여 물체의 존재를 감지합니다. 출력이 임계 값 미만이면 노이즈가있는 것으로 간주됩니다.
레이더는 라디오를 어떻게 사용합니까?
레이더가 선박이나 비행기에 배치되면 무선 신호를 생성하고이를 우주로 전송하고 무언가에 의해 수신하고 마지막으로이를 이해하기위한 정보를 표시하기 위해 유사한 필수 구성 요소 세트가 필요합니다. 마그네트론은 무선을 통해 사용되는 무선 신호를 생성하는 데 사용되는 장치의 한 종류입니다. 이러한 신호는 동일한 속도로 이동하기 때문에 광 신호와 유사하지만 신호는 더 적은 주파수로 훨씬 길어집니다.
광 신호 파장은 500 나노 미터 인 반면 레이더에서 사용하는 무선 신호는 일반적으로 센티미터에서 미터까지 다양합니다. 전자기 스펙트럼에서 라디오 및 빛과 같은 신호는 모두 공기를 통해 다양한 자기 및 전기 에너지 설계로 만들어집니다. 레이더의 마그네트론은 전자 레인지와 동일한 전자 레인지를 생성합니다. 주된 차이는 레이더 내의 마그네트론이 짧은 거리가 아닌 몇 마일의 신호를 전송해야하므로 훨씬 더 강력 할뿐만 아니라 더 강력합니다.
무선 신호가 전송 될 때마다 안테나가 송신기 역할을하여이를 공중으로 전송합니다. 일반적으로 안테나 모양은 구부러져 서 주로 신호를 정확하고 좁은 신호에 집중하지만 레이더 안테나도 일반적으로 회전하여 넓은 영역에서 동작을 감지 할 수 있습니다.
무선 신호는 무언가를 때릴 때까지 초당 300,000km의 속도로 안테나에서 외부로 이동하고 일부는 안테나로 돌아갑니다. 레이더 시스템에는 듀플렉서라는 필수 장치가 있습니다. 이 장치는 송신기와 수신기 사이에서 안테나를 좌우로 바꾸는 데 사용됩니다.
레이더 유형
다음을 포함하는 다양한 유형의 레이더가 있습니다.
바이 스태틱 레이더
이러한 유형의 레이더 시스템에는 추정 된 물체의 거리에 해당하는 거리를 통해 분할되는 Tx- 송신기 및 Rx- 수신기가 포함됩니다. 송신기와 수신기는 유사한 위치에 위치하여 수도원 레이더라고 부르는 반면 매우 장거리 표면 대 공대공 군사 하드웨어는 바이 스태틱 레이더를 사용합니다.
도플러 레이더
도플러 효과를 사용하여 특정 거리의 대상에 대한 데이터 속도를 생성하는 특수 유형의 레이더입니다. 이것은 물체의 동작이 반환 된 신호의 주파수에 어떤 영향을 미쳤는지 분석하기 위해 물체의 방향으로 전자기 신호를 전송함으로써 얻을 수 있습니다.
이 변경은 레이더를 향한 관계 내에서 물체 속도의 방사형 구성 요소에 대해 매우 정확한 측정을 제공합니다. 이러한 레이더의 응용 분야에는 기상, 항공, 의료 등과 같은 다양한 산업이 포함됩니다.
모노 펄스 레이더
이러한 종류의 레이더 시스템은 여러 방향에서 관찰 된 신호를 대조하여 그 옆에있는 특정 레이더 펄스를 사용하여 얻은 신호를 비교합니다. 가장 흔한 유형의 모노 펄스 레이더는 원추형 스캐닝 레이더입니다. 이러한 종류의 레이더는 물체의 위치를 직접 측정하는 두 가지 방법에서 반환을 평가합니다. 1960 년에 개발 된 레이더는 모노 펄스 레이더라는 점에 유의해야합니다.
패시브 레이더
이러한 종류의 레이더는 주로 주변 조명의 표시를 처리하여 표적을 파악하고 추적하도록 설계되었습니다. 이러한 소스는 통신 신호와 상업 방송으로 구성됩니다. 이 레이더의 분류는 동일한 범주의 바이 스태틱 레이더에서 수행 할 수 있습니다.
계측 레이더
이 레이더는 항공기, 미사일, 로켓 등을 테스트하기 위해 설계되었습니다. 후 처리 및 실시간 분석에서 공간, 위치 및 시간을 포함한 다양한 정보를 제공합니다.
기상 레이더
이들은 원형 또는 수평 편광을 통해 무선 신호를 사용하여 방향과 날씨를 감지하는 데 사용됩니다. 기상 레이더의 주파수 선택은 주로 대기 중 수증기의 결과로서 강수 반사뿐만 아니라 감쇠 간의 성능 절충에 달려 있습니다. 일부 유형의 레이더는 주로 풍속을 계산하기 위해 도플러 시프트를 사용하고 강우 유형을 인식하기위한 이중 편광을 사용하도록 설계되었습니다.
레이더 매핑
이 레이더는 주로 원격 감지 및 지리 응용 프로그램을 위해 넓은 지리적 영역을 조사하는 데 사용됩니다. 합성 조리개 레이더의 결과로 이들은 고정 된 목표물로 제한됩니다. 건축 자재에서 발견되는 것과 비교하여 더 다른 벽 뒤에서 사람을 감지하는 데 사용되는 특정 레이더 시스템이 있습니다.
항법 레이더
일반적으로 레이더 검색과 동일하지만 지상과 돌에서 복제 할 수있는 작은 파장으로 사용할 수 있습니다. 이들은 일반적으로 상업용 선박과 장거리 비행기에 사용됩니다. 항해 목적뿐만 아니라 충돌을 피하기 위해 선박에 일반적으로 배치되는 해양 레이더와 같은 다양한 항해 레이더가 있습니다.
펄스 레이더
Pulsed RADAR는 고출력 및 고주파 펄스를 대상 물체로 보냅니다. 그런 다음 다른 펄스가 전송되기 전에 객체의 에코 신호를 기다립니다. RADAR의 범위와 분해능은 펄스 반복 주파수에 따라 다릅니다. 도플러 시프트 방법을 사용합니다.
도플러 시프트를 사용하여 움직이는 물체를 감지하는 RADAR의 원리는 정지 된 물체의 에코 신호가 동일한 위상에 있고 따라서 움직이는 물체의 에코 신호가 약간의 위상 변화를 갖는 동안 취소된다는 사실에서 작동합니다. 이 레이더는 두 가지 유형으로 분류됩니다.
펄스 도플러
도플러 모호성을 피하기 위해 높은 펄스 반복 주파수를 전송합니다. 전송 된 신호와 수신 된 에코 신호는 검출기에서 혼합되어 도플러 편이를 얻고 차이 신호는 원하지 않는 노이즈 신호가 거부되는 도플러 필터를 사용하여 필터링됩니다.

펄스 도플러 레이더의 블록 다이어그램
움직이는 표적 지시자
범위 모호성을 피하기 위해 낮은 펄스 반복 주파수를 전송합니다. MTI RADAR 시스템에서 물체로부터 수신 된 에코 신호는 믹서로 향하며, 여기서 안정 국부 발진기 (STALO)의 신호와 혼합되어 IF 신호를 생성합니다.
이 IF 신호는 증폭 된 다음 위상 검출기에 전달되어 위상이 COHO (Coherent Oscillator)의 신호 위상과 비교되고 차이 신호가 생성됩니다. 코히 런트 신호는 송신기 신호와 위상이 동일합니다. 코 히어 런트 신호와 STALO 신호는 혼합되어 펄스 변조기를 사용하여 켜지고 꺼지는 전력 증폭기에 제공됩니다.

MTI 레이더
연속파
연속파 RADAR는 타겟의 범위를 측정하는 것이 아니라 리턴 신호의 도플러 편이를 측정하여 범위의 변화율을 측정합니다. CW RADAR에서 전자기 방사선은 펄스 대신 방출됩니다. 기본적으로 속도 측정 .
RF 신호와 IF 신호는 믹서 단계에서 혼합되어 국부 발진기 주파수를 생성합니다. 그런 다음 RF 신호가 전송되고 RADAR 안테나에 의해 수신 된 신호는 RF 주파수와 도플러 시프트 주파수로 구성됩니다. 수신 된 신호는 IF 주파수 신호를 생성하기 위해 두 번째 혼합 단계에서 국부 발진기 주파수와 혼합됩니다.
이 신호는 증폭되어 IF 신호와 혼합되어 도플러 주파수를 갖는 신호를 얻는 세 번째 혼합 단계에 제공됩니다. 이 도플러 주파수 또는 도플러 시프트는 타겟의 범위 변화율을 제공하므로 타겟의 속도가 측정됩니다.

CW RADAR를 보여주는 블록 다이어그램
레이더 범위 방정식
레이더 범위 방정식에 사용할 수있는 여러 종류의 버전이 있습니다. 여기에서 다음 방정식은 유일한 안테나 시스템의 기본 유형 중 하나입니다. 물체가 안테나 신호의 중간에 있다고 가정하면 가장 높은 레이더 감지 범위를 다음과 같이 쓸 수 있습니다.
Rmax = 4√Pt λ2G2σ / (4π) 3P 분
= 4√Pt C2G2σ / fo2 (4π) 3P 분
‘Pt’= 송신 전력
‘Pmin’= 감지 가능한 최소 신호
‘λ’= 투과 파장
‘σ’= 표적 레이더의 단면
‘fo’= Hz 단위의 주파수
‘G’= 안테나 이득
‘C’= 광속
위의 방정식에서 변수는 RCS와 같은 표적과는 별도로 레이더에 의존 할뿐만 아니라 안정적입니다. 송신 전력의 순서는 1mW (0dBm)이고 ERP (효율적인 방사 전력)가 20dBm (100mW) 인 경우 안테나 이득은 약 100 (20dB)입니다. 가장 눈에 띄지 않는 신호의 순서는 피코 와트이며 차량의 RCS는 100 평방 미터입니다.
따라서 레이더 범위 방정식의 정확성이 입력 데이터가됩니다. Pmin (최소 눈에 띄는 신호)은 주로 수신기 (B), F (노이즈 지수), T (온도) 및 필요한 S / N 비율 (신호 대 노이즈 비율)의 대역폭에 따라 다릅니다.
대역폭이 좁은 수신기는 넓은 BW 수신기에 비해 응답 성이 더 높습니다. 잡음 지수는 수신기가 신호에 기여할 수있는 잡음의 양을 계산하기 때문에 정의 할 수 있습니다. 잡음 지수가 적을 때 장치가 기부하는 잡음이 줄어 듭니다. 온도가 상승하면 입력 노이즈가 증가하여 수신기의 감도에 영향을 미칩니다.
Pmin = k T B F (S / N) 분
위의 방정식에서
‘Pmin’은 감지 할 수없는 신호입니다.
‘k’는 1.38 x 10-23 (Watt * sec / ° Kelvin)과 같은 볼츠만 상수입니다.
‘T’는 온도 (° Kelvin)입니다.
‘B’는 수신기의 대역폭 (Hz)입니다.
'F'는 잡음 지수 (dB), 잡음 계수 (비율)입니다.
(S / N) min = 최소 S / N 비율
사용 가능한 i / p 열 잡음 전력은 'k'가 볼츠만 상수, 'T'가 온도, 'B'가 수신기 잡음 대역폭 (Hz) 인 경우 kTB에 비례 할 수 있습니다.
T = 62.33 ° F 또는 290 ° K
B = 1Hz
kTB = -174dBm / Hz
위의 레이더 범위 방정식은 제공된 송신 전력, 안테나 이득, RCS 및 파장에 대한 함수 범위와 같이 수신 전력에 대해 작성할 수 있습니다.
Prec = Pt λ2G2σ / (4π) 3R4max = Pt C2G2σ / (4π) 3R4fo2
Prec = PtG2 (λ / 4π) 2 σ / 4πR2
위의 방정식에서
'Prec'는 수신 된 전력입니다.
‘Pt’는 전송 전력입니다.
‘fo’는 전송 주파수입니다.
‘λ’는 전송 파장입니다.
‘G’는 안테나의 이득
‘σ’는 레이더의 단면입니다.
‘R’은 범위입니다.
‘c’는 빛의 속도
응용
그만큼 레이더의 응용 다음을 포함하십시오.
군용 애플리케이션
군대에서 세 가지 주요 응용 프로그램이 있습니다.
- 방공에서는 표적 탐지, 표적 인식 및 무기 제어 (추적 된 표적에 무기를 향하게 함)에 사용됩니다.
- 미사일 시스템에서 무기를 안내합니다.
- 지도에서 적의 위치를 식별합니다.
항공 교통 관제
항공 교통 관제에는 3 가지 주요 응용 분야가 있습니다.
- 공항 근처의 항공 교통을 통제합니다. Air Surveillance RADAR는 공항 터미널에서 항공기의 위치를 감지하고 표시하는 데 사용됩니다.
- Precision Approach RADAR를 사용하여 악천후에 착륙하도록 항공기를 안내합니다.
- 항공기 및 지상 차량 위치를 위해 공항 표면을 스캔하려면
원격 감지
선박의 원활한 경로를 보장하기 위해 행성의 위치를 관찰하거나 관찰하고 해빙을 모니터링하는 데 사용할 수 있습니다.
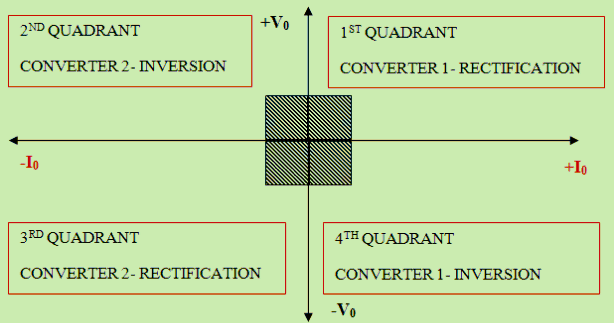
“3상-단일 변환기 ”
지상 교통 통제
또한 교통 경찰이 차량의 속도를 결정하고 다른 차량이나 그 뒤에있는 다른 장애물에 대한 경고를 제공하여 차량의 움직임을 제어하는 데 사용할 수 있습니다.
우주
3 가지 주요 응용 프로그램이 있습니다.
- 달에 안전하게 착륙 할 수 있도록 우주선을 안내하려면
- 행성계를 관찰하려면
- 위성을 감지하고 추적하려면
- 유성을 모니터링하려면
그래서 이제 나는 기본적인 RADAR의 이해 , RADAR를 포함하는 간단한 프로젝트를 디자인하는 것은 어떻습니까?
사진 크레딧
- CW RADAR를 보여주는 블록 다이어그램 Radartutorial