이 게시물은 정적 또는 문구류 사람의 존재를 감지하는 수동 적외선 센서 기능을 향상시키는 데 사용할 수있는 방법을 설명합니다. 이 기능은 일반적으로 기존 PIR 센서에서는 불가능합니다.
PIR이 사람의 존재를 감지하는 방법
나는 이미이 웹 사이트에서 많은 PIR 기반 동작 감지기 애플리케이션에 대해 논의했지만, 이러한 모든 애플리케이션은 PIR이 자신의 존재를 감지하도록 유지하기 위해 인간의 존재가 지속적으로 움직여야합니다. 이것은 이러한 장치가 감지하지 못하도록하는 큰 단점 인 것으로 보입니다. 일정하거나 고정 된 인간 거주.
그러나 위에서 설명한 단점에는 이유가 있습니다. 기존 PIR 센서는 전면 렌즈에있는 두 개의 병렬 슬롯을 통해 인체의 IR 신호를 감지하여 작동하며 내부 회로는 IR 신호가 이러한 감지 슬롯 ( '비전') 사이를 교차 할 때만 활성화됩니다.
감지 슬롯을 가로 지르는 IR 신호의 교차는 PIR 회로가 정보를 해당하는 두 개의 교번 펄스로 변환 할 수 있도록하며, 이는 차례로 정류되어 PIR의 출력 핀에서 트리거링 전압을 생성합니다.
PIR이 편지지 대상을 감지하지 못함
이는 IR 소스가 움직이지 않는 경우 PIR 모듈이 출력 핀에 트리거를 생성하도록 프롬프트하지 않음을 의미합니다. 또한 소스의 IR 신호가 영역 내에서 주어진 사람을 감지 할 수 있도록 주어진 PIR 감지 슬롯을 가로 질러 계속 교차해야 함을 의미합니다.
PIR 모듈을 내부적으로 수정할 수 없기 때문에 직접적이거나 단순한 해결책이없는 것 같습니다. 이로 인해 장치가 정지 된 사람의 존재를 감지하지 못합니다.
그러나 논리적 관찰은 PIR 모듈을 활성화하는 데 필요할 수있는 가변 IR 소스 인 경우 PIR 자체가 피사체 대신 계속 움직 이도록 강제하지 않는 이유를 알려줍니다.
이 개념은 진동하는 PIR 모듈과 감지 영역에있는 정적 인간을 보여주는 다음 GIF 시뮬레이션에서 시각화 할 수 있습니다.

여기에서는 진동하는 PIR이 문제에 어떻게 적응하고 자체적으로 변형되어 정적 IR 피사체도 감지 할 수 있는지 확인할 수 있습니다.
이것은 PIR 모듈의 움직임을 통해 고정 IR 소스를 두 개의 수신 슬롯에 걸쳐 지속적으로 변화하는 IR 이미징으로 변환하기 때문에 가능합니다.
아이디어가 복잡해 보이지만 실제로는 느린 진동 PwM 제어 모터 회로를 사용하여 간단히 해결할 수 있습니다.
다음 섹션에서 전체 메커니즘과 회로 세부 정보를 배웁니다.
이미 논의했듯이 기존의 PIR 모듈은 움직이는 살아있는 물체 만 감지 할 수 있으며 고정 된 대상을 식별 할 수 없으므로 응용 프로그램이 인간 동작 감지기로만 제한됩니다.
그러한 시나리오에서 운동성이없는 사람의 점유 감지가 필요한 애플리케이션의 경우 기존 PIR은 쓸모 없게 될 수 있으며 자체 업그레이드를 위해 일부 외부 장치가 필요할 수 있습니다.
움직이지 않는 표적을 감지하는 PIR 설계
위 섹션에서 우리는 목표물이 움직일 필요없이 PIR 모듈 자체가 원하는 정적 목표 감지를 구현하기 위해 주어진 반경 위로 이동할 수 있다는 것을 배웠습니다.
다음 섹션에서는 제안 된 발진을 위해 소형 DC 모터 위에 장착 된 PIR과 함께 사용할 수있는 간단한 회로 메커니즘에 대해 알아 봅니다.
PWM / 플립 플롭 제어 모터 드라이버
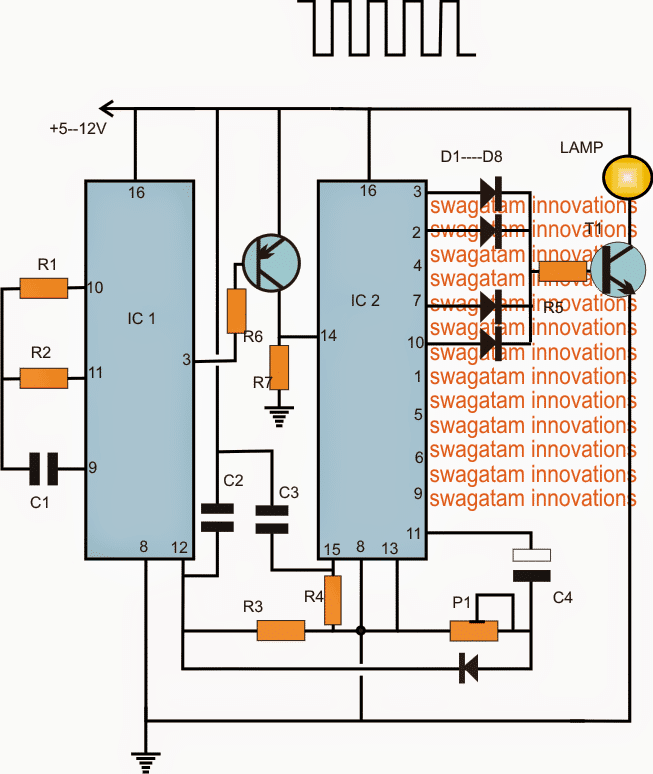
이 시스템은 기본적으로 PWM 제어 속도 결정 및 플립 플롭 전환 모터. 다음 다이어그램은 간단한 회로를 사용하여 이러한 기능이 PIR 모터에 어떻게 기여하는지 보여줍니다.

표시된 회로는 6 개의 인버터 NOT 게이트를 포함하는 단일 IC HEF40106 헥스 반전 슈미트 게이트 IC를 사용합니다.
게이트 N1 및 N2는 버퍼를 형성하는 게이트 N4, N5, N6에 공급되는 조정 가능한 PWM 출력을 생성하도록 구성됩니다.
이러한 버퍼 게이트의 공통 출력은 모터 드라이버 MOSFET의 게이트로 종단됩니다.
PWM 내용은 P1의 도움으로 설정되며 DPDT 릴레이 접점 세트를 통해 연결된 모터에 최종적으로 적용됩니다.
이 릴레이 접점은 모터 이동 방향 (시계 방향 또는 시계 반대 방향)을 결정합니다.
이 플립 플롭 DPDT 릴레이 접점은 게이트 N3 주변에 구성된 불안정한 타이머에 의해 제어되며, 커패시터 C3 / R3은 모터가 회전 방향을 일관되게 변경하기 위해 릴레이를 전환해야하는 속도를 결정합니다.
위의 설계를 통해 모터는 주어진 반경 영역에서 필요한 느리고 이리저리 진동 운동을 실행할 수 있습니다.
C3는 5 ~ 6 초마다 전환을 시작하도록 선택 될 수 있으며 PWm은 매우 느린 모터 움직임을 가능하게하도록 조정할 수 있습니다. PIR의 슬롯이 대상의 IR 신호를 통과하도록하기 만하면되기 때문입니다. 적시에.
그러나 모터 작동이 느리기 때문에 PIR의 출력은 지연 OFF 타이머를 통해 유지되어야합니다. 그래야 연결된 부하가 꺼 지거나 켜지지 않고 모터 움직임이 사람이 거주하는 IR 라인을 번갈아 가며 차단할 수 있습니다.
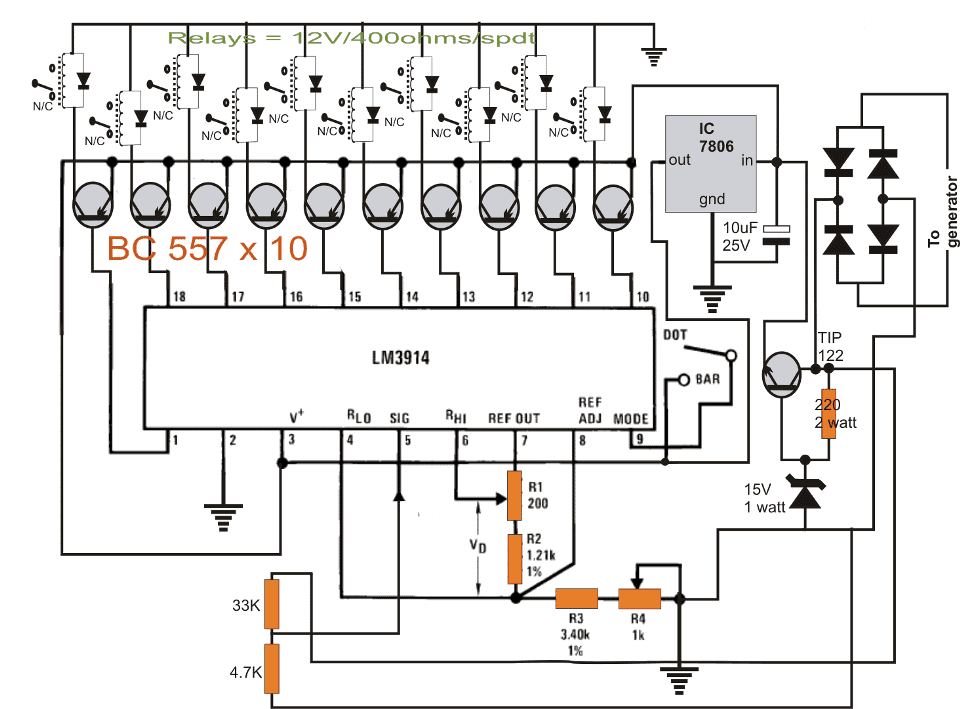
지연 타이머
다음과 같은 지연 타이머 회로 단계 PIR 출력이 감지 된 펄스를 생성 할 때마다 타이머의 지연이 5 ~ 10 초 동안 연장되고 연결된 부하가 프로세스 중에 중단되지 않도록하는 데 사용할 수 있습니다.

위의 설정에서 이전 단락에서 설명한대로 PWM / 플립 플롭 단계에서 전기 드라이브 공급을받는 모터를 볼 수 있습니다.
모터의 스핀들은 PIR이 고정 된 수평 샤프트와 결합되어있는 것을 볼 수 있습니다. 따라서 모터가 움직일 때 PIR은 이에 상응하는 반경 방향 움직임을 통과합니다.
위의 PIR 모션이 유도되는 동안 영역에있는 고정 된 타겟의 IR 신호는 파란색 선으로 표시된 PIR의 출력 핀에서 생성되는 짧은 대체 펄스 형태로 감지됩니다.
이 펄스는 1000uF 커패시터에 적용되어 각 펄스로 충전되고 BC547이 프로세스 동안 중단없이 전도 모드로 유지되도록합니다.
BC557 스테이지로 구성된 릴레이 드라이버는 BC547 콜렉터의 위의 안정적인 신호에 응답하고 PIR이 사람의 존재를 계속 감지하는 한 릴레이를 ON으로 유지합니다.
따라서 릴레이 부하는 해당 영역에 고정 된 사람이 있기 때문에 지속적으로 활성화됩니다.
그러나 사람이 거주하지 않거나 대상이 구역에서 멀어 질 경우 지연 타이머 단계는 계전기와 부하를 규정 된 5 ~ 10 초 동안 활성화 한 후 구역이 다시 캡처 될 때까지 영구적으로 차단됩니다. 잠재적 IR 방출 원에 의해.
부품 목록
- R1, R4 = 10K
- R2 = 47 옴
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0.1uF / 100V
- Z1 = 15V, 1/2 와트
- Q1 = IRF540
- 2 분기 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST 스위치 또는 DPDT 릴레이
- R3, C3는 시행 착오에 의해 결정됩니다.
최신 정보:
위에서 설명한 정적 인간 존재를 감지하기위한 PIR 회로는 다음 GIF 시뮬레이션에 묘사 된 것처럼 신호 초퍼 회로를 사용하여 훨씬 단순화 할 수 있습니다.
세심한 검사를 통해 실제로 진동 운동이 필요하지 않으며 모터와 초퍼 블레이드를 유지하여 자유롭게 회전 할 수 있음을 보여줍니다. 낮은 수준의 모터 속도 .
이것은 또한 의도 된 정적 PIR 감지 작업을 효과적으로 수행 할 수 있습니다.

PIR에 대한 정적 사람 감지를 입증하는 비디오 데모
이전 : 3 사운드 활성화 스위치 회로 설명 다음 : 집에서 만들 수있는 4 가지 간단한 사이렌 회로