
임베디드 시스템 소개
소프트웨어의 전용 목적이 하드웨어 설계에 내장 된 시스템을 내장형 시스템이라고합니다. 이 시스템은 독립적 인 시스템이거나 더 큰 시스템 일 수 있습니다. 소프트웨어는 일반적으로 메모리 모듈 컴퓨터처럼 보조 메모리가 필요하지 않습니다. 통신, 스마트 카드, 미사일, 컴퓨터 네트워킹, 디지털 가전 위성은 임베디드 시스템 애플리케이션의 일부입니다.

임베디드 시스템 애플리케이션
임베디드 시스템 애플리케이션 로봇 공학, 디지털 카메라, 멀티 태스킹 장난감, 요리 및 세척 시스템, 생체 의학 시스템, 키보드 컨트롤러, 모바일 및 스마트 폰, 컴퓨팅 시스템, 전자 스마트 웨이트 디스플레이 시스템 및 비디오, 게임, 음악 시스템 및 비디오 게임 등.
임베디드 시스템 설계 프로세스 회로가 오작동 할 경우 하드웨어 변경이 매우 어려워지기 때문에 회로 테스트에 사용되는 시뮬레이션을 먼저 수행 할 수 있습니다. 결과가 원하는 결과와 일치하면 프로세스는 순차적 인 웨이퍼 프로세스에 의해 영구적으로 설계됩니다.
임베디드 시스템의 기초
임베디드 시스템은 특정 작업을 수행하도록 설계되었지만 다른 작업을 수행하는 범용 컴퓨터로는 사용할 수 없습니다. 임베디드 시스템 용 소프트웨어는 일반적으로 펌웨어라고하며 디스크 또는 단일 칩에 저장할 수 있습니다. 시스템의 두 가지 주요 요소는 다음과 같습니다.
- 임베디드 시스템 하드웨어
- 임베디드 시스템 소프트웨어

임베디드 시스템 하드웨어 및 소프트웨어
임베디드 시스템 하드웨어 : 임베디드 시스템에는 다양한 실시간 입력 및 출력 또는 변수와 상호 작용할 수있는 하드웨어 플랫폼이 필요합니다. 하드웨어에는 다음과 같은 컨트롤러가 포함됩니다. 마이크로 컨트롤러 또는 마이크로 프로세서 , 메모리 모듈, I / O 인터페이스, 디스플레이 시스템 및 통신 모듈 등
임베디드 시스템 소프트웨어 :이 소프트웨어는 다양한 작업을 제어 할 수 있도록 원하는 방식으로 프로그래밍 할 수 있습니다. 고수준 형식으로 작성되고 코드로 컴파일 된 다음 하드웨어 컨트롤러에 덤프됩니다.
실시간 임베디드 시스템 모니터링, 응답 및 외부 움직임 제어와 같은 작업을 수행하는 컴퓨터 시스템입니다. 외부 환경은 다음을 통해 컴퓨터 시스템에 연결됩니다. 센서 , 액추에이터 및 I / O 인터페이스. 컴퓨터 시스템이 내장 된 실제 컴퓨터 시스템을 실시간 내장 시스템이라고합니다. 실시간 임베디드 시스템은 군사, 정부 부문 및 의료 분야와 같은 다양한 분야에서 사용됩니다.
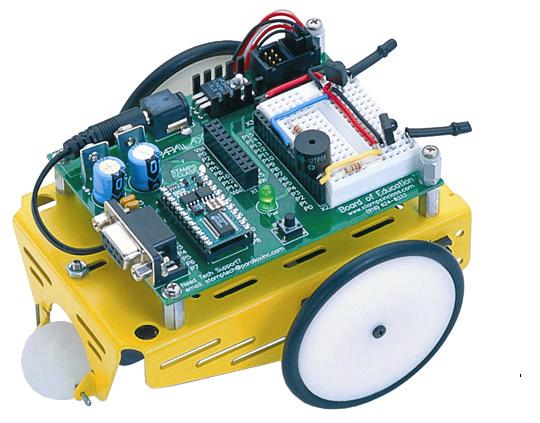
임베디드 시스템의 로봇 실시간 프로젝트
임베디드 시스템 자동차, 로봇 공학, 산업 등과 같은 많은 실시간 응용 프로그램에서 사용할 수 있습니다. 실시간 프로젝트는 로봇 기술과 관련이 있습니다. .
1. 장거리 음성 인식 기능을 갖춘 음성 제어 로봇 차량
이 프로젝트의 목적은 원격 작동을 위해 음성 명령으로 로봇 차량을 제어하는 것입니다. 안 8051 마이크로 컨트롤러 음성 인식 모듈과 함께 사용하여 원하는 작업을 수행합니다. 8051 마이크로 컨트롤러, 음성 인식 모듈, 푸시 버튼, RF 모듈, 인코더, 디코더, 모터 드라이버 IC, DC 모터, 배터리 및 기타 기타 구성 요소를 사용합니다.

음성 제어 로봇 차량-송신기
마이크로 컨트롤러와 연동되는 음성 인식 모듈을 통해 푸시 버튼이나 음성 명령을 사용하여 왼쪽, 오른쪽, 위, 아래와 같은 차량 이동을 수행 할 수 있습니다. 여기서 인코더는 다음을 사용하여 마이크로 컨트롤러에 주어진 명령을 인코딩하는 데 사용됩니다. RF 송신기 433MHz의 주파수에서 신호를 전송합니다.
따라서 버튼을 눌러 나오는 신호 나 움직임에 해당하는 음성 명령 신호가 micrcontroller에 의해 수신되면 송신기 모듈을 통해 수신기 회로로 제어 신호를 보냅니다.

음성 제어 로봇 차량 수신기
이러한 신호를 수신하면 RF 수신기는이 신호를 디코더 회로로 전송하여 바이너리 데이터를 micrcontroller 수준의 신호로 변환합니다. 따라서 micrcontroller는 송신기 회로에서 원하는 움직임을 수행합니다. 레이저 모듈은 마이크로 컨트롤러와 인터페이스 어두운 곳에서도 로봇이 수행하는 동작을 감지합니다.
2. 매장 관리를위한 터치 스크린 기반 원격 제어 로봇 차량
이 프로젝트에는 로봇 차량 제어가 포함됩니다. 터치 스크린 디스플레이 사용 원격 작동을위한 단위. 터치 스크린 패널은 송신기 끝에 배치되고 픽앤 플레이스 로봇 신호에 응답하여 작업을 수행하기 위해 수신기 끝에 배치됩니다. 이 프로젝트에 사용 된 하드웨어 구성 요소에는 8051 마이크로 컨트롤러, 터치 스크린 패널, 안테나 (송신기-수신기 측), 인코더, 디코더, DC 모터, 로봇 본체, 배터리 등이 포함됩니다.

터치 스크린 기반 로봇 차량-송신기
위 프로젝트의 음성 인식 모듈에서 논의한 바와 같이,이 프로젝트에서도 터치 스크린 모듈은 차량 이동에 해당하는 제어 신호를 마이크로 컨트롤러로 보냅니다. 컨트롤러는 이후에 이러한 신호를 인코더로 보낸 다음 결국 신호를 수신기 회로로 전송하는 송신기로 보냅니다.

터치 스크린 기반 로봇 식 차량 수신기
수신기 끝에 배치 된 안테나는 송신 안테나로부터 RF 신호를 수신하고 데이터를 디코딩 한 다음 해당 데이터를 마이크로 컨트롤러로 보냅니다. 이 설정에는 마이크로 컨트롤러와 인터페이스 된 4 개의 모터가 있습니다. 두 개의 모터는 암과 그리퍼의 움직임을위한 것이고 다른 두 개는 신체의 움직임을위한 것입니다. 이 모든 모터는 마이크로 컨트롤러로부터 명령을 지속적으로 수신하는 모터 드라이버 IC에 의해 구동됩니다.
이들은 둘입니다 임베디드 시스템 애플리케이션 로봇 공학 분야에서. 임베디드 시스템의 실시간 예를 통해 임베디드 시스템의 개념을 더 잘 이해할 수 있습니다. 이러한 프로젝트를 구현하는 데 더 궁금한 점이 있으면 아래에 의견을 말하여 문의 할 수 있습니다.
사진 크레딧





{kind=link}