현재 공업 자동화 , 다양한 유형의 스마트 필드 장치가 활용되지만 모든 장치를 업계 내에서 당국이나 필드 엔지니어가 모니터링하는 것은 매우 어렵습니다. 따라서 일반적으로 이러한 종류의 모니터링은 산업 안팎의 서로 다른 연결된 장치 간에 주요 모니터링 시스템으로 데이터를 전송할 수 있는 스마트 장치로 이루어집니다. 따라서 HART 프로토콜은 1980년에 도입되었으며 Bell 202 표준을 기반으로 구축되었습니다. 이 프로토콜은 산업 표준이 되어 산업 자동화에 사용됩니다. 따라서 이 기사에서는 HART 프로토콜 – 응용 프로그램 작업.
HART 프로토콜이란 무엇입니까?
HART 프로토콜에서 HART라는 용어는 'Highway Addressable Remote Transducer'를 의미하며, 이는 스마트 장치와 제어 시스템 . 이 프로토콜은 매우 대중적이어서 전 세계적으로 3천만 개 이상의 장치가 HART 프로토콜로 구동됩니다. 이 프로토콜은 호스트 시스템과 산업 분야의 스마트 필드 장치 간의 통신을 설정하는 데 사용됩니다.
HART 프로토콜은 디지털 스마트 계측의 주요 이점을 포함하면서 기존의 4-20mA 기반 아날로그 프로토콜을 지원하는 기능으로 인해 더 많은 인기를 얻었습니다.
이 프로토콜은 물리적 연결 기술과 다른 응용 프로그램에서 사용하는 명령을 설명합니다. Hart 명령은 Universal, Common Practice 및 Device Specific의 세 가지 유형입니다.
범용 유형 명령은 모든 HART 장치를 통해 구현됩니다. 이러한 명령은 주로 컨트롤러가 필드 장치를 식별하고 프로세스 데이터를 읽는 데 사용합니다.
Common Practice 유형 명령은 일반적으로 현장 장치에만 적용할 수 있는 다양한 기능을 설명하는 데 사용됩니다. 이러한 장치에는 범위 변경, 엔지니어링 단위 선택 및 자체 테스트 실행을 위한 명령이 포함됩니다.
장치별 유형 명령은 모든 장치에 대해 동일하지 않습니다. 이 명령은 고유한 구성 및 수정 기능을 실행합니다. 따라서 다양한 제조업체의 장치가 유사한 기능을 외부에서 구현할 때 유의하는 것이 매우 중요합니다. 예를 들어, 차압 측정에는 완전히 다른 하드웨어와 다른 장치별 명령 세트가 포함될 수 있습니다.
HART 프로토콜 아키텍처
HART 프로토콜은 아래에서 설명하는 점대점 및 다중점과 같은 두 가지 네트워크 구성에서 작동합니다.
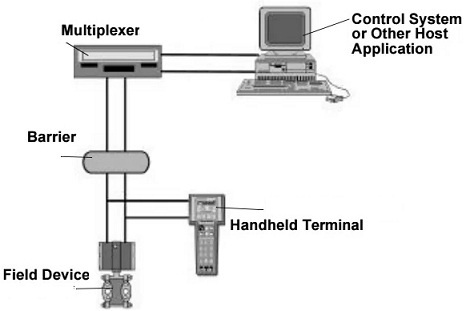
지점간 네트워크 구성
지점간 네트워크 구성에서 단일 프로세스 변수를 통신하기 위해 고정 4–20mA 신호가 사용되는 반면 추가 프로세스 변수 및 설계 매개변수는 HART 프로토콜을 통해 디지털로 전송됩니다. 따라서 4~20mA 아날로그 신호는 HART 신호에 의해 변경되지 않고 정상적인 방법으로 사용할 수 있습니다. HART 통신 디지털 신호는 2차 변수에 대한 입력 권한을 제공하며 기타 데이터는 유지보수, 시운전, 운영 및 진단 목적으로 활용될 수 있습니다.
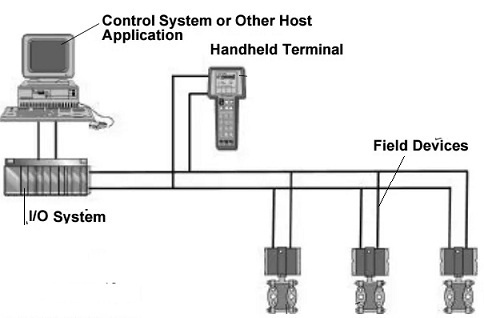
멀티 드롭 네트워크 구성
이 네트워크 구성을 사용하면 한 쌍의 전선으로 다양한 장치를 연결할 수 있습니다. 이 구성 내의 통신은 모든 장치의 전류가 장치가 정상적으로 작동하기에 충분한 최소값으로 고정되어 있으므로 아날로그 루프 전류 전체의 통신이 비활성화되기 때문에 완전히 디지털입니다. 4mA.
HART 통신은 어떻게 작동합니까?
HART 통신 프로토콜은 Bell 202 FSK(Frequency Shift Keying) 표준을 사용하여 1,200Hz 및 2,200Hz와 같은 두 가지 다른 주파수로 표현되는 디지털 신호를 중첩합니다. 여기에서 1,200Hz 주파수는 비트 1을 나타내고 2,200Hz 주파수는 비트 0을 나타냅니다.
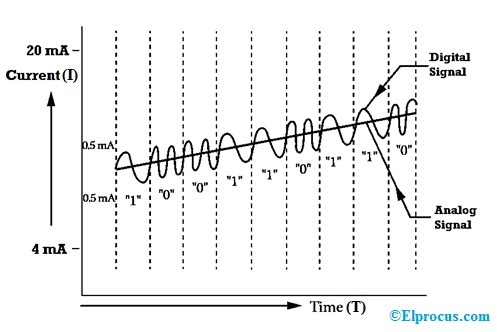
이러한 주파수의 사인파가 DC 아날로그 신호 케이블에 배치되면 데이터 전송이 발생합니다. 따라서 이 데이터 전송 중에 4-20mA 신호는 0에 해당하는 주파수 편이 키 신호의 표준 값으로 인해 영향을 받지 않습니다. 이 프로토콜은 4-20mA 아날로그 신호 및 디지털 신호와 같은 두 개의 통신 채널을 동시에 지원합니다.
아날로그 신호는 기본 측정값을 4-20mA 전류 루프와 통신하는 반면 추가 장치 데이터는 아날로그 신호에 오버레이된 디지털 신호를 통해 통신합니다.
디지털 신호에는 장치의 상태, 진단, 계산된 값 등과 같은 장치의 정보가 포함됩니다. 따라서 두 개의 통신 채널이 함께 사용 및 구성이 매우 간단한 매우 강력하고 저렴한 통신 솔루션을 제공합니다. 이 프로토콜은 아날로그 및 디지털 통신을 모두 결합하기 때문에 하이브리드 프로토콜이라고도 합니다.
HART 기술은 마스터 장치가 연결된 후에만 슬레이브 장치가 작동하기 때문에 마스터/슬레이브 프로토콜로 차별화됩니다. 여기서 슬레이브 장치는 스마트 장치이고 마스터 장치는 컴퓨터입니다.
HART 프로토콜 모드
일반적으로 HART 프로토콜 내 통신을 위해 네트워크 내에서 사용되는 장치는 PLC 또는 마스터로 선택된 분산 제어 시스템인 반면 다른 필드 장치는 센서 또는 액추에이터와 같은 슬레이브로 간주됩니다. 그러나 여기서 마스터와 슬레이브 간의 통신은 주로 시스템이 배치되는 통신 모드에 따라 다릅니다. HART 프로토콜 네트워크는 마스터/슬레이브 모드 및 버스트 모드와 같은 두 가지 모드에서 통신합니다.
마스터/슬레이브 모드
이 모드는 요청-응답 모드라고도 합니다. 이 유형의 모드에서 슬레이브 장치는 마스터 장치의 요청이 발행되면 단순히 데이터를 전송합니다. 각 HART 루프에 대해 두 개의 마스터를 연결할 수 있습니다. 따라서 기본 마스터는 일반적으로 DCS(분산 제어 시스템), PC(개인용 컴퓨터) 또는 PLC(프로그래밍 가능한 논리 컨트롤러)인 반면 보조 마스터는 또 다른 PC 또는 휴대용 터미널입니다. 슬레이브 장치는 마스터 장치의 명령에 반응하는 액추에이터, 컨트롤러 및 송신기입니다.
버스트 모드
일부 HART 프로토콜 지원 장치는 단순히 이 통신 모드를 지원합니다. 이 모드를 사용하면 초당 3~4개의 데이터 업데이트와 같은 더 빠른 통신이 가능합니다. 이 모드의 마스터 장치는 일반적인 HART 응답 메시지를 계속해서 전송하도록 슬레이브 장치에 지시합니다. 마스터는 슬레이브가 버스트를 중지하도록 명령할 때까지 고속으로 메시지를 수신합니다. 이 모드는 위의 하나의 HART 장치가 HART 루프에서 통신하는 데 필요한 경우에 적용할 수 있습니다.
HART 프로토콜 대 Modbus
HART 프로토콜과 Modbus의 차이점은 다음과 같습니다.
|
HART 프로토콜 |
모드버스 |
| HART는 하이브리드 프로토콜입니다. | Modbus는 데이터 통신 프로토콜입니다. |
| HART는 소규모 자동화에서 고도로 복잡한 산업 애플리케이션에 이르는 프로세스 및 계측 시스템에서 광범위하게 사용됩니다. | 모드버스 일반적으로 계측 및 제어 장치에서 데이터 수집 시스템 또는 메인 컨트롤러로 신호를 전송하는 데 사용됩니다. |
| 이 프로토콜은 포인트 투 포인트 및 멀티 드롭과 같은 두 가지 작동 모드에서 작동합니다. | Modbus는 ASCII 모드 또는 RTU 모드와 같은 두 가지 전송 모드에서 작동합니다. |
장점
그만큼 HART 프로토콜의 장점 다음을 포함합니다.
- HART 프로토콜에 의해 활성화된 장치를 사용하면 사용자가 장치가 작동 능력을 최적화하기 위해 가장 정밀한 데이터를 사용하도록 할 수 있습니다.
- 잠재적인 문제가 발생하기 전에 미리 인식하여 장비의 고장으로 인한 다운타임을 줄입니다.
- 재고 비용과 장치 유지 관리를 줄입니다.
- 문제 인식 및 문제 해결을 위한 대기 시간을 줄입니다.
- 고급 진단을 사용하여 안전 무결성 수준을 향상시킵니다.
- HART 프로토콜 선택의 이점은 주로 다음과 같습니다. 디지털 기능, 아날로그 기능, 가용성 및 상호 운용성.
- 이 프로토콜은 다른 장치 및 센서와 함께 사용할 수도 있습니다.
- HART 프로토콜 기반 장치는 업계에서 광범위하게 사용됩니다.
- 이 프로토콜은 시스템 가용성, 진행 규칙성 등을 증가시킵니다.
단점
그만큼 HART 프로토콜의 단점 다음을 포함합니다.
- HART 전송 내의 디지털 신호는 상당히 느립니다.
- 멀티 드롭 배열의 경우 아날로그 신호에 액세스할 수 없습니다. 전송선을 분할할 수 있는 장치의 수가 제한됩니다.
- 언제든지 하나의 프로세스 변수만 모니터링할 수 있습니다.
- 이 유형의 프로토콜은 Profibus 및 Foundation Fieldbus와 같은 다른 Fieldbus 시스템에 비해 다소 느립니다. 따라서 이러한 느린 응답 시간은 일부 산업 기반 응용 프로그램 내에서 약간의 어려움을 야기합니다.
- 일반적으로 HART 프로토콜의 속도는 프로세스 변수가 빠르게 변하지 않는 간단한 모니터링 시스템에 충분합니다.
애플리케이션
그만큼 HART 프로토콜의 응용 다음을 포함합니다.
- HART 프로토콜은 스마트 장치와 제어 시스템 사이에서 아날로그 배선으로 디지털 데이터를 송수신하기 위해 전 세계적으로 사용됩니다.
- 이것은 산업 자동화에서 사용되는 매우 인기 있는 프로토콜입니다.
- 이 프로토콜은 주로 스마트 장치를 분석하기 위한 것입니다.
- 이것은 공정 및 계측 시스템에서 널리 사용됩니다.
- 이러한 유형의 통신 프로토콜은 체적 유량, 질량 유량, 밀도 및 온도가 단일 케이블을 통해 제어 시스템으로 통신될 수 있는 모든 곳에서 질량 유량계를 포함하는 다변수 기기에 이상적입니다.
- 이 프로토콜은 주로 산업 공정 제어 및 측정 애플리케이션에서 사용하도록 설계되었습니다.
- HART 프로토콜은 주로 프로세스 산업에서 서로 다른 장치 간의 통신에 사용됩니다.
따라서 이것은 HART 프로토콜의 작동 . 이 프로토콜은 DCS 및 PLC 시스템과 같은 모니터링 또는 제어 시스템뿐만 아니라 스마트 필드 장치 사이의 아날로그 와이어를 통해 디지털 데이터를 송수신하는 데 사용되는 글로벌 표준입니다. 이 양방향 통신 프로토콜은 핸드헬드 장치에서 자산 관리 시스템 또는 플랜트 컨트롤러에 이르기까지 필드와 호스트 컨트롤러 간에 추가 데이터에 대한 입력 권한을 제공합니다. 다음은 질문입니다. HART 프로토콜의 전체 형식은 무엇입니까?