이 게시물에서는 모터 사이클의 기존 버튼 시동 시스템을 수정하여 엔진이 시동되는 즉시 비활성화되고 필요한 최소 RPM을 얻는 방법에 대해 설명합니다.
이 아이디어는 Jordan 씨가 요청했습니다.
회로 요구 사항
- 전자 제품 교육에 중점을 둔 멋진 사이트 / 블로그를 방금 발견했습니다.
- 어떻게해야하는지 조언 해 주시겠습니까?
- 내 문제는 전기 시동기가 달린 오토바이가 있다는 것입니다.
- 이 모델에서는 엔진이 이미 작동 중일 때 실수로 스타터 스위치를 누르면 손상을 입힐 수있는 알려진 문제입니다.
- 스타터 시스템은 단방향 클러치가 아닌 기어 결합에 의존합니다.
- 안타깝게도 제조사는 과도한 스타터 참여를 방지 할 수있는 방법을 제공하지 않았습니다.
- 엔진 회전 수가 약 500rpm에 도달하면 스타터를 비활성화하는 '인터록'효과를 제공하기 위해 회로를 추가하고 싶습니다.
- 나는 이것을 스스로 해결할 능력이 없지만 PCB의 배선과 납땜을 할 수 있습니다.
- 자전거는 개별 코일이있는 4 스트로크 V- 트윈입니다.
- 모든 지침을 주시면 감사하겠습니다.
회로 설계
엔진이 약 500RPM에 도달 할 때 래칭 효과는 간단한 IC 555 기반 주파수-전압 변환기 회로를 통해 구현할 수 있습니다.
나는 이미 간단한 타코미터 기반 속도 컨트롤러 회로 이전 게시물 중 일부에서 동일한 개념이 현재 요구 사항에도 효과적으로 적용될 수 있습니다.
IC 555는 멋진 작은 칩이며이 IC를 사용하여 만들 수있는 응용 프로그램이 무수히 많을 것입니다.
여기에서 타코미터 모드에서 IC 555는 단 안정 멀티 바이브레이터처럼 작동합니다. RC 타이밍 구성 요소의 미리 결정된 값에 따라 고정 된 폭의 짧은 펄스를 생성합니다.
이러한 펄스의 밀도 또는 PPM (펄스 위치 변조)은 공급 된 입력 신호의 주파수 또는 차량의 RPM 데이터에 따라 변경됩니다.
“수정 발진기 작동 원리 ”
주파수가 상승하면 펄스 밀도가 비례 적으로 높아지고 낮은 주파수에서는 밀도가 비례 적으로 낮아집니다.
RC 통합기를 연결하면 이러한 다양한 PPM을 다양한 등가 DC 출력으로 변환 할 수 있으며, 이는 그에 따라 RPM 데이터에 따라 달라집니다.
RPM 신호는 CDI 점화 플러그 출력 또는 차량의 픽업 코일 출력에서.
작동 원리

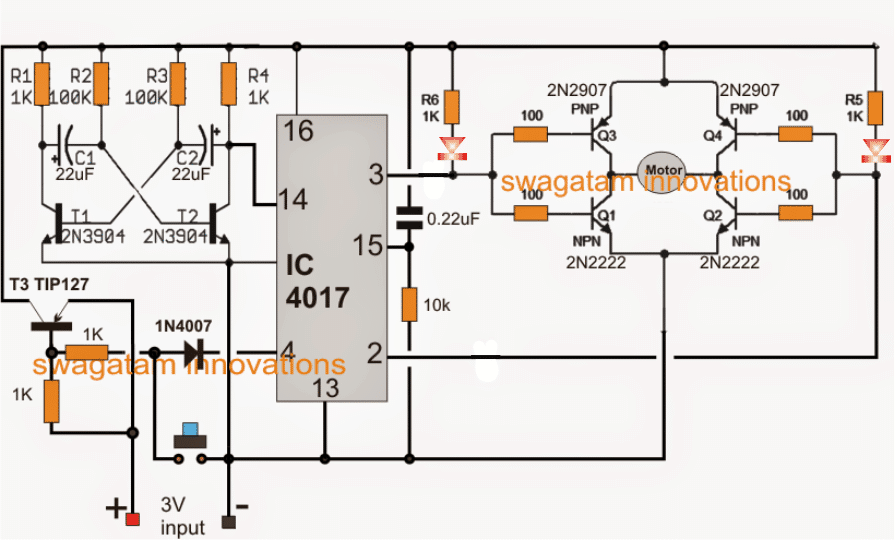
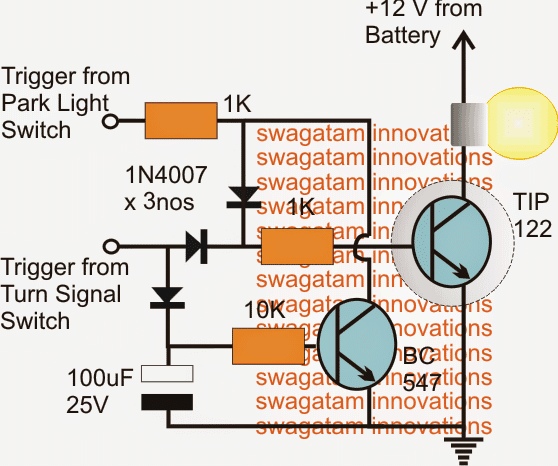
제안 된 모터 사이클 버튼 시동 잠금 장치의 회로도를 살펴보면 기본적으로 두 단계로 나누어 진 디자인을 알 수 있습니다.
왼쪽 단계는 차량의 CDI에서 입력 된 RPM 주파수 신호를 다양한 펄스 밀도 출력으로 효과적으로 변환하는 IC 555 기반 PPM 생성기입니다.
이러한 다양한 펄스 밀도 출력은 IC 555의 3 번 핀에서 몇 개의 저항 및 커패시터 네트워크를 사용하여 구축 된 3 레벨 RC 통합기에 공급됩니다.
적분기는 IC555의 펄스를 평활화하고 RPM 주파수에 응답하여 지속적으로 상승하거나 감소하는 전압으로 변환합니다.
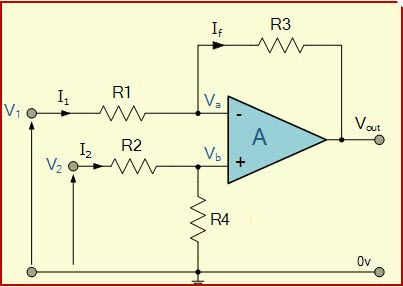
디자인의 오른쪽에있는 IC 741 스테이지는 일반 컴 파타 회로 DC 레벨을 감지하고 DC가 지정된 한계에 도달하면 릴레이를 활성화하도록 배치됩니다.
IC 741의 10K 프리셋은 통합 기 단계에서 500RPM 주파수에 해당하는 DC 출력이 얻어 질 때 IC 741의 핀 # 2가 핀 # 3 전위보다 약간 높아지도록 조정됩니다.
이런 일이 발생하면 IC 741의 출력이 낮아지고 BJT와 릴레이가 켜지고 스위치가 켜지면 점화 시스템에서 스타터 스위치가 분리됩니다.
IC741의 핀 # 6 및 핀 # 2에 걸쳐있는 1N4148 다이오드는 회로가 래치되도록하여 차량이 멈출 때까지 시동 스위치가 영구적으로 비활성화 된 상태로 유지되고 회로에 대한 공급이 제거됩니다.
IC 555와 관련된 포트 또는 사전 설정은 적분기 출력에서 RPM에서 DC로 변환 할 수있는 최상의 결과를 최적화하고 달성하는 데 사용할 수 있습니다.
논의 된 단계는 별도로 테스트 및 확인하고 단계가 완벽하게 설정 및 확인 된 후에 만 함께 결합하는 것이 좋습니다.
관련 질문이 있으시면 아래의 의견 상자를 사용하십시오.
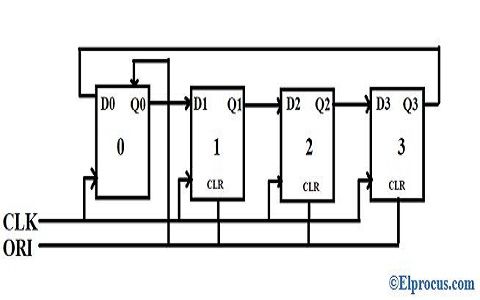
Previous : Arduino와 트랜지스터 (BJT) 및 MOSFET을 연결하는 방법 Next : UP DOWN 로직 시퀀스 컨트롤러 회로