이 게시물은 장난감 응용 프로그램을 수행하는 데 사용되는 간단한 프로그래밍 된 역방향 순방향 모터 회로를 설명합니다. 이 아이디어는 매튜 씨가 요청했습니다.
기술 사양
나는 훌륭한 리소스 인 귀하의 웹 사이트의 새로운 추종자입니다!
회로 설계에 도움이 필요합니다.
제 딸은 자동차라는 학교 프로젝트를 가지고 있습니다. 순간 스위치가 몇 초 동안 전진 동작을 활성화하는 2 단계 시간 회로를 구축하고 싶습니다.
그런 다음 몇 초 동안 반대 동작을 위해 극성을 반대로합니다. 모터 전압은 3v입니다. 이 빌드를 도울 수 있다면 매우 도움이 될 것입니다. 미리 감사드립니다.
매티.
디자인
순차 지연 타이머 회로를 사용하는 자동 정방향 역방향 작동을 특징으로하는 제안 된 모터 장난감 회로는 다음 다이어그램에서 시각화 할 수 있습니다.
위의 다이어그램을 참조하면, T1, T2 스테이지는 관련 구성 요소와 함께 원하는 모터 역방향 순방향 타이밍 기간에 해당하는 발진기 주파수 기간을 갖는 불안정한 다중 진동기를 형성합니다.
TIP127 단계는 회로의 푸시 버튼 시작을 가능하게하는 래치 회로입니다.
IC (4017)는 Q1 ----- Q4로 구성된 트랜지스터 드라이버 스테이지에 대해 순방향 및 역방향 펄스를 실행합니다.

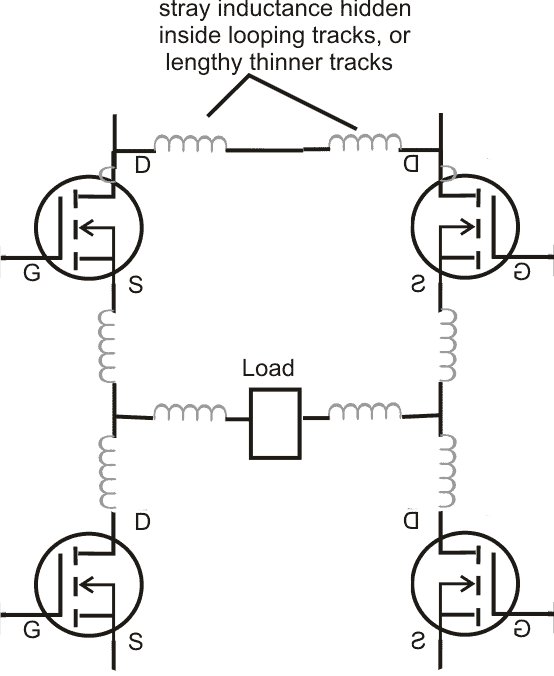
트랜지스터 드라이버는 IC 4017 출력에서 수신 된 트리거에 응답하여 모터의 역방향 순방향 동작을 용이하게하기위한 H- 브리지로 구성됩니다.
회로는 다음 설명을 통해 이해할 수 있습니다.
누름 버튼을 잠시 누르면 T3는 스위치를 통해 짧은 접지 펄스를 수신하여 트랜지스터를 켜고 회로에 양의 펄스를 공급합니다.
초기화 트리거는 IC 4017의 핀 4에 로직 로우가 나타나게하여 푸시 버튼을 놓은 후에도 T3을 고정 ON 위치로 고정하고 래치합니다.
동시에 pin15는 pin3이 로직 하이에서 시작하도록 IC를 재설정하는 포지티브 펄스를 수신합니다.
처음에는 pin3이 높으면 브리지 네트워크를 가로 지르는 모터 와이어의 극성에 따라 H 브리지와 모터가 특정 방향으로 작동합니다.
이제 T1과 T2가 카운팅을 시작하고 설정 시간이 경과하는 순간, pin14는 T2의 콜렉터로부터 트리거링 펄스를 수신하여 pin3 하이 로직이 pin2로 이동하도록합니다.
위의 조건은 즉시 H- 브리지 극성을 되돌리고 IC의 핀 14에 다음 펄스가 도달 할 때까지 모터가 반대 동작을 시작하도록합니다.
후속 펄스가 IC 4017의 핀 14에서 감지 되 자마자 IC의 핀 2에있는 하이 로직이 이제 한 단계 앞당겨 IC의 핀 4에 정착합니다.
그러나 pin4가 T3과 연관되어 있기 때문에이 핀의 high는 즉시 T3을 끄고 결과적으로 래치를 차단하고 전체 회로의 전원을 끕니다.
이제 장난감 모터 회로는 푸시 버튼을 다시 누를 때까지 완전히 꺼집니다.
0.1uF 커패시터를 R2와 병렬로 연결하여 전원을 켤 때마다 T2가 먼저 ON을 트리거하고 설정된 시간 간격 측면에서 시스템을 올바르게 구현할 수 있도록해야합니다.
시간 지연 조정
시간 간격은 R2 / R3 또는 C1 / C2 또는이 두 쌍의 값을 변경하여 사용자 기본 설정에 따라 설정하거나 조정할 수 있습니다.
여기서 회로는 장난감으로 구현되지만 흥미로운 산업 응용 분야가 많을 수 있으며 여러 사용자 지정 프로그래밍 된 기계 활성화를 실행하도록 수정할 수 있습니다.
이전 : 오토바이 및 자동차 용 LED 브레이크 라이트 회로 다음 : 원격 제어 천장 팬 조정기 회로