집적 회로의 첫 번째 발명은 1959 년에 이루어졌으며 이것은 마이크로 프로세서의 역사를 기념하는 것입니다. 그리고 최초로 발명 된 마이크로 프로세서는 1971 년에 Intel 4004였습니다. 여러 컴퓨터 주변 장치 구성 요소가 하나의 칩에 통합 된 중앙 처리 장치 (CPU)라고도합니다. 여기에는 레지스터, 제어 버스, 클록, ALU, 제어 섹션 및 메모리 장치가 포함됩니다. 여러 세대에 걸쳐 현재 세대의 마이크로 프로세서는 64 비트 프로세서를 사용하는 높은 계산 작업도 수행 할 수있었습니다. 이것은 마이크로 프로세서에 대한 간략한 평가이며 오늘 논의 할 유형은 8085 마이크로 프로세서 아키텍처입니다.
8085 마이크로 프로세서 란 무엇입니까?
일반적으로 8085는 8 비트입니다. 마이크로 프로세서, NMOS 기술의 도움으로 1976 년 인텔 팀에 의해 출시되었습니다. 이 프로세서는 마이크로 프로세서의 업데이트 된 버전입니다. 구성 8085 마이크로 프로세서 주로 데이터 버스 -8 비트, 주소 버스 -16 비트, 프로그램 카운터 -16 비트, 스택 포인터 -16 비트, 8 비트, + 5V 전압 공급을 등록하고 3.2MHz 단일 세그먼트 CLK에서 작동합니다. 8085 마이크로 프로세서의 응용 프로그램은 전자 레인지, 세탁기, 가제트 등에 관련됩니다. 8085 마이크로 프로세서의 특징 다음과 같습니다.
- 이 마이크로 프로세서는 동시 접근 방식으로 8 비트 정보를 수신, 작동 또는 출력하는 8 비트 장치입니다.
- 프로세서는 16 비트 및 8 비트 주소와 데이터 라인으로 구성되어 있으므로 장치의 용량은 2입니다.1664KB의 메모리입니다.
- 단일 NMOS 칩 장치로 구성되며 6200 개의 트랜지스터가 있습니다.
- 총 246 개의 작동 코드와 80 개의 명령어가 있습니다.
- 8085 마이크로 프로세서에는 8 비트 입력 / 출력 주소 라인이 있으므로 주소 2를 지정할 수 있습니다.8= 256 개의 입력 및 출력 포트.
- 이 마이크로 프로세서는 40 핀 DIP 패키지로 제공됩니다.
- I / O에서 메모리로, 메모리에서 I / O로 방대한 정보를 전송하기 위해 프로세서는 DMA 컨트롤러와 버스를 공유합니다.
- 인터럽트 처리 메커니즘을 향상시킬 수있는 접근 방식이 있습니다.
- 8085 프로세서는 IC 8355 및 IC 8155 회로의 지원을 사용하여 3 칩 마이크로 컴퓨터로 작동 할 수도 있습니다.
- 내부 클럭 생성기가 있습니다.
- 듀티 사이클이 50 % 인 클록 사이클에서 작동합니다.
8085 마이크로 프로세서 아키텍처
8085 마이크로 프로세서의 아키텍처는 주로 타이밍 및 제어 장치, 산술 및 논리 장치, 디코더, 명령어 레지스터, 인터럽트 제어, 레지스터 배열, 직렬 입력 / 출력 제어. 마이크로 프로세서의 가장 중요한 부분은 중앙 처리 장치입니다.

8085 아키텍처
8085 마이크로 프로세서의 작동
ALU의 주요 연산은 더하기, 증가, 빼기, 감소, AND, OR, Ex-OR과 같은 논리 연산 , 보완, 평가, 왼쪽 시프트 또는 오른쪽 시프트. 임시 레지스터와 누산기는 작업 전반에 걸쳐 정보를 유지하는 데 사용되며 결과는 누산기에 저장됩니다. 작업 결과에 따라 다른 플래그가 정렬되거나 재정렬됩니다.
플래그 레지스터
플래그 레지스터 마이크로 프로세서 8085 사인, 제로, 보조 캐리, 패리티, 캐리의 5 가지 유형으로 분류됩니다. 이러한 유형의 플래그를 위해 따로 설정된 비트의 위치. ALU 작동 후 최상위 비트 (D7)의 결과가 1이면 부호 플래그가 정렬됩니다. ALU 결과의 연산이 0이면 0 플래그가 설정됩니다. 결과가 0이 아니면 0 플래그가 재설정됩니다.

8085 마이크로 프로세서 플래그 레지스터
산술 과정에서 더 적은 니블로 캐리가 생성 될 때마다 보조 유형 캐리 플래그가 설정됩니다. ALU 조작 후 결과가 짝수이면 패리티 플래그가 설정되거나 그렇지 않으면 재설정됩니다. 캐리에서 산술 처리 결과가 나오면 캐리 플래그가 설정되거나 재설정됩니다. 5 가지 유형의 플래그 중 AC 유형 플래그는 BCD 산술을 위해 내부에 사용되며 나머지 4 개의 플래그는 개발자와 함께 사용되어 프로세스 결과의 조건을 확인합니다.
제어 및 타이밍 장치
제어 및 타이밍 장치는 클록에 의해 마이크로 프로세서의 모든 동작을 조정하고 필요한 제어 신호를 제공합니다. 통신 마이크로 프로세서와 주변 장치 사이에서.
디코더 및 명령 레지스터
순서는 명령 레지스터에있는 메모리에서 얻은 후 다른 장치 주기로 인코딩 및 디코딩됩니다.
어레이 등록
범용 프로그래밍 가능 레지스터는 여러 유형으로 분류됩니다. B, C, D, E, H, L과 같은 누산기와는 별개입니다. 이들은 8 비트 레지스터로 사용되며 그렇지 않으면 l6 비트 데이터를 비축하기 위해 결합됩니다. 허용 된 커플은 BC, DE & HL이며 단기 W & Z 레지스터는 프로세서에 사용되며 개발자와 함께 사용할 수 없습니다.
특수 목적 레지스터
이러한 레지스터는 프로그램 카운터, 스택 포인터, 증가 또는 감소 레지스터, 주소 버퍼 또는 데이터 버퍼의 네 가지 유형으로 분류됩니다.
프로그램 카운터
이것은 특수 목적 레지스터의 첫 번째 유형이며 명령이 마이크로 프로세서에 의해 수행되고 있다고 간주합니다. ALU가 명령 수행을 완료하면 마이크로 프로세서는 수행 할 다른 명령을 검색합니다. 따라서 시간을 절약하기 위해 수행 할 다음 명령 주소를 보유해야합니다. 마이크로 프로세서는 명령이 수행 될 때 프로그램을 증가 시키므로 다음 명령 메모리 주소에 대한 프로그램 카운터 위치가 수행됩니다.
8085의 스택 포인터
SP 또는 스택 포인터는 16 비트 레지스터이며 스택과 유사한 기능을하며 푸시 및 팝 프로세스 전체에서 2 개씩 지속적으로 증가 또는 감소합니다.
증가 또는 감소 레지스터
8 비트 레지스터 내용 또는 메모리 위치는 하나로 증가 또는 감소 할 수 있습니다. 16 비트 레지스터는 프로그램을 늘리거나 줄이는 데 유용합니다. 카운터 포인터 레지스터 내용을 하나로 스택합니다. 이 작업은 모든 메모리 위치 또는 모든 종류의 레지스터에서 수행 할 수 있습니다.
주소 버퍼 및 주소 데이터 버퍼
주소 버퍼는 실행을 위해 메모리에서 복사 된 정보를 저장합니다. 메모리 및 I / O 칩이 이러한 버스와 연결되면 CPU가 선호하는 데이터를 I / O 칩과 메모리로 대체 할 수 있습니다.
주소 버스 및 데이터 버스
데이터 버스는 비축 될 관련 정보를 전달하는 데 유용합니다. 양방향이지만 주소 버스는 저장해야하는 위치를 나타내며 단방향으로 정보 전송 및 주소 입력 / 출력 장치에 유용합니다.
타이밍 및 제어 장치
타이밍 및 제어 장치는 특정 프로세스를 달성하기 위해 8085 마이크로 프로세서 아키텍처에 신호를 공급하는 데 사용할 수 있습니다. 타이밍 및 제어 장치는 내부 및 외부 회로를 제어하는 데 사용됩니다. RD 'ALE, READY, WR'과 같은 제어 장치, S0, S1, IO / M '과 같은 상태 장치, HLDA와 같은 DM, HOLD 장치, RST-IN 및 RST-OUT과 같은 RESET 장치의 4 가지 유형으로 분류됩니다. .
핀 다이어그램
이 8085는 40 핀 마이크로 프로세서로 7 개 그룹으로 분류됩니다. 아래의 8085 마이크로 프로세서 핀 다이어그램을 통해 기능과 목적을 쉽게 알 수 있습니다.

8085 핀 다이어그램
데이터 버스
12에서 17까지의 핀은 AD 인 데이터 버스 핀입니다.0-에7, 이것은 최소한의 상당한 8 비트 데이터 및 주소 버스를 전달합니다.
주소 버스
21에서 28까지의 핀은 A 인 데이터 버스 핀입니다.8-에열 다섯, 이것은 가장 상당한 8 비트 데이터 및 주소 버스를 전달합니다.
상태 및 제어 신호
작동 동작을 확인하기 위해 이러한 신호가 주로 고려됩니다. 8085 장치에는 제어 및 상태 신호가 각각 3 개 있습니다.
RD – 이것은 READ 동작의 조절에 사용되는 신호입니다. 핀이 로우로 이동하면 선택한 메모리를 읽었 음을 의미합니다.
WR – 이것은 WRITE 동작의 조절에 사용되는 신호입니다. 핀이 로우로 이동하면 데이터 버스 정보가 선택한 메모리 위치에 기록되었음을 나타냅니다.
그러나 – ALE는 Address Latch Enable 신호에 해당합니다. ALE 신호는 기계의 초기 클럭주기에 높으며 이로 인해 주소의 마지막 8 비트가 메모리 또는 외부 래치와 래치 될 수 있습니다.
난 / 남 – I / O 또는 메모리 장치에 할당 할 주소를 인식하는 상태 신호입니다.
준비된 –이 핀은 주변기기가 정보를 전송할 수 있는지 여부를 지정하는 데 사용됩니다. 이 핀이 하이 일 때 데이터를 전송하고 이것이 로우 일 경우 마이크로 프로세서 장치는 핀이 하이 상태가 될 때까지 기다려야합니다.
에스0및 S1 핀 –이 핀은 아래 작업을 정의하는 상태 신호이며 다음과 같습니다.
| S0 | S1 | 풍모 와이 |
| 0 | 0 | 중지 |
| 1 | 0 | 쓰다 |
| 0 | 1 | 읽다 |
| 1 | 1 | 술책 |
클록 신호
CLK – 이것은 핀 37 인 출력 신호입니다. 이것은 다른 디지털 집적 회로에서도 사용됩니다. 클럭 신호의 주파수는 프로세서 주파수와 유사합니다.
X1 및 X2 – 핀 1과 2의 입력 신호입니다.이 핀은 장치의 내부 회로 시스템을 작동하는 외부 발진기와 연결되어 있습니다. 이 핀은 마이크로 프로세서 기능에 필요한 클록 생성에 사용됩니다.
신호 재설정
핀 3 및 36에는 리셋 인 및 리셋 아웃 인 두 개의 리셋 핀이 있습니다.
리셋 –이 핀은 프로그램 카운터를 0으로 재설정하는 것을 의미합니다. 또한이 핀은 HLDA 플립 플롭 및 IE 핀을 재설정합니다. 제어 처리 장치는 RESET이 트리거되지 않을 때까지 재설정 상태에 있습니다.
밖으로 리셋 –이 핀은 CPU가 리셋 상태임을 나타냅니다.
직렬 입력 / 출력 신호
SID – 이것은 직렬 입력 데이터 라인 신호입니다. 이 날짜 표시 줄에있는 정보는 7일RIM 기능이 수행 될 때 ACC의 비트.
잔디 – 이것은 직렬 출력 데이터 라인 신호입니다. ACC의 7일비트는 SIIM 기능이 수행 될 때 SOD 데이터 라인의 출력입니다.
외부에서 시작되고 신호를 중단 함
HLDA – HOLD 요청 수신 신호를 나타내는 HOLD 확인 신호입니다. 요청이 제거되면 핀이 로우 상태가됩니다. 이것이 출력 핀입니다.
보류 –이 핀은 다른 장치가 데이터 및 주소 버스를 활용해야 함을 나타냅니다. 이것이 입력 핀입니다.
INTA –이 핀은 INTR 핀 수신 후 마이크로 프로세서 장치에서 지시하는 인터럽트 승인입니다. 이것이 출력 핀입니다.
에 – 인터럽트 요청 신호입니다. 다른 인터럽트 신호와 비교할 때 우선 순위가 가장 낮습니다.
| 인터럽트 신호 | 다음 지시 위치 |
| 덫 | 0024 |
| RST 7.5 | 003C |
| RST 6.5 | 0034 |
| RST 5.5 | 002C |
트랩, RST 5.5, 6.5, 7.5 – 이들은 모두 입력 인터럽트 핀입니다. 인터럽트 핀 중 하나가 인식되면 다음 표에 따라 메모리의 일정한 위치에서 다음 신호가 작동합니다.
이러한 인터럽트 신호의 우선 순위 목록은 다음과 같습니다.
트랩 – 최고
RST 7.5 – 높음
RST 6.5 – 중간
RST 5.5 – 낮음
INTR-최저
전원 공급 장치 신호는 Vcc 과 대 + 5V 및 접지 핀입니다.

8085 마이크로 프로세서 인터럽트
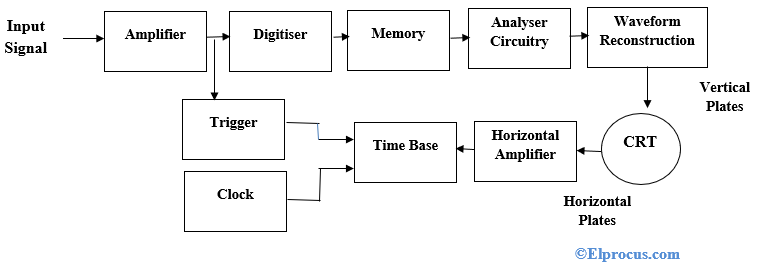
8085 마이크로 프로세서의 타이밍 다이어그램
마이크로 프로세서의 작동과 성능을 명확하게 이해하려면 타이밍 다이어그램이 가장 적합한 접근 방식입니다. 타이밍 다이어그램을 사용하면 시스템 기능, 모든 명령 및 실행의 세부 기능 등을 쉽게 알 수 있습니다. 타이밍 다이어그램은 시간에 해당하는 단계의 지침을 그래픽으로 표현한 것입니다. 이는 클럭주기, 시간주기, 데이터 버스, RD / WR / 상태와 같은 작동 유형 및 클럭주기를 나타냅니다.
8085 마이크로 프로세서 아키텍처에서 I / O RD, I / O WR, 메모리 RD, 메모리 WR 및 opcode 페치의 타이밍 다이어그램을 살펴 보겠습니다.
Opcode 가져 오기
타이밍 다이어그램은 다음과 같습니다.

I / O 읽기
타이밍 다이어그램은 다음과 같습니다.

I / O 쓰기
타이밍 다이어그램은 다음과 같습니다.

메모리 읽기
타이밍 다이어그램은 다음과 같습니다.

메모리 쓰기
타이밍 다이어그램은 다음과 같습니다.

이러한 모든 타이밍 다이어그램에서 일반적으로 사용되는 용어는 다음과 같습니다.
RD – 높으면 마이크로 프로세서가 데이터를 읽지 않음을 의미하고, 낮 으면 마이크로 프로세서가 데이터를 읽었 음을 의미합니다.
WR – 높으면 마이크로 프로세서가 데이터를 쓰지 않음을 의미하고, 낮 으면 마이크로 프로세서가 데이터를 기록함을 의미합니다.
난 / 남 – 높으면 장치가 I / O 작업을 수행함을 의미하고, 낮 으면 마이크로 프로세서가 메모리 작업을 수행함을 의미합니다.
그러나 –이 신호는 유효한 주소 가용성을 의미합니다. 신호가 높으면 주소 버스로 작동하거나 낮 으면 데이터 버스로 작동합니다.
S0 및 S1 – 진행중인 기계주기의 종류를 나타냅니다.
아래 표를 고려하십시오.
| 상태 신호 | 제어 신호 | |||||
| 기계주기 | 나는 / M ' | S1 | S0 | RD’ | WR ' | INTA’ |
| Opcode 가져 오기 | 0 | 1 | 1 | 0 | 1 | 1 |
| 메모리 읽기 | 0 | 1 | 0 | 0 | 1 | 1 |
| 메모리 쓰기 | 0 | 0 | 1 | 1 | 0 | 1 |
| 입력 읽기 | 1 | 1 | 0 | 0 | 1 | 1 |
| 입력 쓰기 | 1 | 0 | 1 | 1 | 0 | 1 |
8085 마이크로 프로세서 명령어 세트
그만큼 8085의 명령어 세트 마이크로 프로세서 아키텍처는 정확한 작업을 수행하는 데 사용되는 명령어 코드 일 뿐이며 명령어 세트는 제어, 논리, 분기, 산술 및 데이터 전송 명령어와 같은 다양한 유형으로 분류됩니다.
8085의 주소 지정 모드
주소 지정 모드 8085 마이크로 프로세서 내용을 변경하지 않고 다른 형태로 정보를 표시하는 데 사용되는 이러한 모드에서 제공하는 명령으로 정의 할 수 있습니다. 이들은 즉시, 등록, 직접, 간접 및 묵시적 주소 지정 모드의 5 개 그룹으로 분류됩니다.
즉시 주소 지정 모드
여기서 소스 피연산자는 정보입니다. 정보가 8 비트이면 명령어는 2 바이트입니다. 또는 정보가 16 비트 인 경우 명령은 3 바이트입니다.
아래 예를 고려하십시오.
MVI B 60 – 60H 날짜를 B 레지스터로 빠르게 이동하는 것을 의미합니다.
JMP 주소 – 피연산자 주소의 빠른 점프를 의미합니다.
주소 지정 모드 등록
여기서 조작해야하는 정보는 레지스터에 있고 피연산자는 레지스터입니다. 따라서 작업은 마이크로 프로세서의 여러 레지스터 내에서 발생합니다.
아래 예를 고려하십시오.
INR B – 레지스터 B 내용이 1 비트 씩 증가 함을 의미합니다.
MOV A, B – 레지스터 B에서 A로 내용 이동을 의미합니다.
ADD B – 레지스터 A와 레지스터 B가 추가되고 A에 출력이 누적됨을 의미합니다.
JMP 주소 – 피연산자 주소의 빠른 점프를 의미합니다.
직접 주소 지정 모드
여기서 연산해야하는 정보는 메모리 위치에 존재하고 피연산자는 직접 메모리 위치로 간주됩니다.
아래 예를 고려하십시오.
LDA 2100 – 메모리 위치 콘텐츠를 누산기 A로로드하는 것을 의미합니다.
IN 35 – 주소가 35 인 포트에서 정보를 읽는 것을 의미합니다.
간접 주소 지정 모드
여기서 연산해야하는 정보는 메모리 위치에 있고 피연산자는 간접적으로 레지스터 쌍으로 간주됩니다.
아래 예를 고려하십시오.
LDAX B – B-C 레지스터의 내용을 누산기로 이동하는 것을 의미합니다.
LXIH 9570 – 위치 9570의 주소로 H-L 쌍을 즉시로드 함을 의미합니다.
암시 적 주소 지정 모드
여기서 피연산자는 숨겨지고 연산해야하는 정보는 데이터 자체에 존재합니다.
예 :
RRC – 어큐뮬레이터 A를 오른쪽 위치로 1 비트 회전하는 것을 의미합니다.
RLC – 축전지 A를 왼쪽 위치로 1 비트 회전하는 것을 의미합니다.
응용
마이크로 프로세서 장치의 개발과 함께 여러 산업과 영역에 걸쳐 많은 사람들의 삶에 큰 변화와 변화가있었습니다. 장치의 비용 효율성, 최소 무게 및 최소 전력 사용으로 인해 이러한 마이크로 프로세서는 요즘 많이 사용됩니다. 오늘, 우리는 8085 마이크로 프로세서 아키텍처의 애플리케이션 .
8085 마이크로 프로세서 아키텍처는 Jump, Add, Sub, Move 등과 같은 여러 기본 명령이있는 명령 세트에 포함되어 있습니다. 이 명령 세트를 사용하면 명령이 작동 장치가 이해할 수있는 프로그래밍 언어로 구성되며 덧셈, 나눗셈, 곱셈, 이동 이동 등과 같은 다양한 기능을 수행합니다. 이러한 마이크로 프로세서를 통해 훨씬 더 복잡한 작업을 수행 할 수도 있습니다.
엔지니어링 응용
마이크로 프로세서를 사용하는 애플리케이션은 트래픽 관리 장치, 시스템 서버, 의료 장비, 처리 시스템, 리프트, 거대한 기계, 보호 시스템, 조사 영역에 있으며 자동 출입이 가능한 잠금 시스템은 거의 없습니다.
의료 도메인
의료 산업에서 마이크로 프로세서의 가장 큰 용도는 마이크로 프로세서가이 장치를 조절하는 인슐린 펌프입니다. 계산 저장, 바이오 센서에서받은 정보 처리, 결과 검토와 같은 여러 기능을 운영합니다.
통신
- 통신 영역에서 전화 산업이 가장 중요하고 향상되고 있습니다. 여기에서 마이크로 프로세서는 디지털 전화 시스템, 모뎀, 데이터 케이블, 전화 교환 및 기타 여러 분야에서 사용됩니다.
- 위성 시스템에 마이크로 프로세서를 적용한 TV는 원격 회의의 가능성도 허용했습니다.
- 항공사 및 철도 등록 시스템에서도 마이크로 프로세서가 사용됩니다. 컴퓨터 시스템에서 수직 데이터 통신을 설정하기위한 LAN 및 WAN.
전자
컴퓨터의 두뇌는 마이크로 프로세서 기술입니다. 이들은 마이크로 컴퓨터에서 슈퍼 컴퓨터에 이르기까지 다양한 유형의 시스템에서 구현됩니다. 게임 산업에서는 마이크로 프로세서를 사용하여 수많은 게임 지침이 개발됩니다.
텔레비전, Ipad, 가상 제어 장치는 이러한 마이크로 프로세서로 구성되어 복잡한 지침과 기능을 수행합니다.
따라서 이것은 모두 8085 마이크로 프로세서 아키텍처에 관한 것입니다. 마지막으로 위의 정보로부터 우리는 8085 마이크로 프로세서 기능 40 핀으로 둘러싸인 8 비트 마이크로 프로세서이며 작동에 + 5V 공급 전압을 사용합니다. 16 비트 스택 포인터와 프로그램 카운터, 74 개 명령어 세트 등으로 구성됩니다. 여기에 질문이 있습니다. 8085 마이크로 프로세서 시뮬레이터 ?