이 게시물에서는 필요한 출력이 최대 효율을 달성 할 수 있도록 올바른 벅 컨버터 인덕터를 설계하는 데 필요한 다양한 매개 변수를 이해하려고 노력할 것입니다.
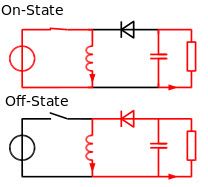
이전 게시물에서 우리는 벅 컨버터의 기초 본질적으로 벅 컨버터의 출력 전압을 결정하는 PWM의 주기적 시간과 관련하여 트랜지스터의 ON 시간에 관한 중요한 측면을 실현했습니다.
이 글에서는 입력 전압, 트랜지스터의 스위칭 시간, 출력 전압과 벅 인덕터의 전류 사이의 관계를 평가하고 벅 인덕터를 설계하는 동안이를 최적화하는 방법에 대해 좀 더 자세히 살펴 보겠습니다.

벅 컨버터 사양
먼저 벅 컨버터와 관련된 다양한 매개 변수를 이해해 보겠습니다.
피크 인덕터 전류, ( 나는pk ) = 인덕터가 포화되기 전에 저장할 수있는 최대 전류량입니다. 여기서 '포화'라는 용어는 트랜지스터 스위칭 시간이 너무 길어서 인덕터가 최대 또는 피크 전류 저장 용량을 초과 한 후에도 계속 켜져있는 상황을 의미합니다. 이는 바람직하지 않은 상황이므로 피해야합니다.
최소 인덕터 전류, ( 나는또는 ) = 인덕터가 방전되는 동안 역기전력의 형태로 저장된 에너지를 방출하여 인덕터가 도달 할 수있는 최소 전류량입니다.
즉, 트랜지스터가 꺼지는 과정에서 인덕터는 저장된 에너지를 부하로 방전하고 그 과정에서 저장된 전류는 0으로 기하 급수적으로 떨어지지 만 0에 도달하기 전에 트랜지스터는 다시 켜질 것으로 예상 될 수 있습니다. 트랜지스터가 다시 켜질 수있는 지점을 최소 인덕터 전류라고합니다.
위의 조건은 연속 모드라고도합니다. 벅 컨버터 설계 .
인덕터 전류가 0으로 떨어지기 전에 트랜지스터가 다시 켜지지 않으면 상황을 불연속 모드라고 할 수 있으며, 이는 벅 컨버터를 작동하는 데 바람직하지 않은 방법이며 시스템의 비효율적 인 작동으로 이어질 수 있습니다.
리플 전류, (Δi = 나는pk - 나는또는 ) = 인접한 공식에서 볼 수 있듯이 리플 Δ i는 벅 인덕터에서 유도 된 피크 전류와 최소 전류의 차이입니다.
벅 컨버터의 출력에있는 필터 커패시터는 일반적으로이 리플 전류를 안정화하고 상대적으로 일정하게 만드는 데 도움이됩니다.
듀티 사이클, (D = 티의 위에 /티) = 듀티 사이클은 트랜지스터의 ON 시간을주기적인 시간으로 나누어 계산합니다.
주기적 시간은 하나의 PWM 사이클이 완료하는 데 걸리는 총 시간, 즉 트랜지스터에 공급되는 하나의 PWM의 ON 시간 + OFF 시간입니다.
트랜지스터의 ON 시간 ( 티의 위에 = D / f) = PWM의 ON 시간 또는 트랜지스터의 '스위치 ON'시간은 듀티 사이클을 주파수로 나누어 얻을 수 있습니다.
평균 출력 전류 또는 부하 전류 ( 나는새 = Δi / 2 = 나 하중 ) = 리플 전류를 2로 나눈 값입니다.이 값은 벅 컨버터 출력의 부하에서 사용할 수있는 피크 전류와 최소 전류의 평균입니다.
삼각파의 RMS 값 irms = √ { 나는또는 두 + (Δi) 두 / 12} = 이 식은 벅 컨버터와 연관 될 수있는 모든 또는 모든 삼각파 구성 요소의 RMS 또는 제곱 평균 제곱근 값을 제공합니다.
좋습니다. 위의 내용은 벅 인덕터를 계산하는 동안 사용할 수있는 벅 컨버터와 관련된 다양한 매개 변수와 표현식입니다.
이제 다음 설명 된 데이터에서 전압 및 전류가 벅 인덕터와 어떻게 관련되는지, 그리고 이것이 어떻게 올바르게 결정될 수 있는지 알아 보겠습니다.
여기서 우리는 트랜지스터의 스위칭이 연속 모드에 있다고 가정하고 있음을 기억하십시오. 즉, 인덕터가 저장된 EMF를 완전히 방전하고 비울 수 있기 전에 트랜지스터가 항상 켜집니다.
이는 실제로 인덕터 용량 (턴 수)과 관련하여 트랜지스터의 ON 시간 또는 PWM 듀티 사이클의 치수를 적절하게 지정함으로써 수행됩니다.
V와 I 관계
벅 인덕터 내에서 전압과 전류 간의 관계는 다음과 같이 정리할 수 있습니다.
V = L di / dt
또는
나는 = 1 / L 0ʃtVdt + i또는
위의 공식은 벅 출력 전류를 계산하는 데 사용할 수 있으며 PWM이 기하 급수적으로 상승 및 감소하는 파형이거나 삼각 파일 때 양호합니다.
그러나 PWM이 직사각형 파형 또는 펄스 형태 인 경우 위 공식은 다음과 같이 작성할 수 있습니다.
나는 = (Vt / L) + 나는또는
여기서 Vt는 권선에 걸리는 전압에 유지되는 시간 (마이크로 초)을 곱한 값입니다.
이 공식은 벅 인덕터의 인덕턴스 값 L을 계산할 때 중요합니다.
위의 표현은 PWM이 삼각파 형태 일 때 벅 인덕터의 전류 출력이 선형 램프 또는 넓은 삼각파 형태임을 보여줍니다.
이제 벅 인덕터 내에서 피크 전류를 결정하는 방법을 살펴 보겠습니다. 공식은 다음과 같습니다.
ipk = (Vin-Vtrans-Vout) Ton / L + i또는
위의 표현은 트랜지스터가 켜져있는 동안 그리고 인덕터 내부의 전류가 선형 적으로 증가 할 때 (포화 범위 * 내에서) 피크 전류를 제공합니다.
피크 전류 계산
따라서 위의 식은 트랜지스터가 스위치 ON 단계에있는 동안 벅 인덕터 내부의 피크 전류 축적을 계산하는 데 사용할 수 있습니다.
표현식 io가 LHS로 이동하면 다음을 얻습니다.
나는pk-나또는= (와인-Vtrans-Vout) Ton / L
여기서 Vtrans는 트랜지스터의 컬렉터 / 이미 터에서 전압 강하를 나타냅니다.
리플 전류는 Δi = ipk-io로도 주어 지므로 위의 공식에서 이것을 대체하면 다음과 같이됩니다.
Δi = (Vin – Vtrans – Vout) Ton / L ------------------------------------- Eq #1
이제 트랜지스터의 스위치 오프 기간 동안 인덕터 내 전류를 획득하는 식을 살펴 보겠습니다. 다음 방정식을 사용하여 결정할 수 있습니다.
나는또는= 나는pk-(Vout-VD) Toff / L
다시 말하지만, 위 식에서 ipk-io를 Δi로 대체하면 다음과 같은 결과를 얻을 수 있습니다.
Δi = (Vout-VD) Toff / L ------------------------------------- Eq # 2
Eq # 1 및 Eq # 2는 트랜지스터가 인덕터에 전류를 공급하는 동안, 즉 ON 시간 동안, 인덕터가 부하를 통해 저장된 전류를 배출하는 동안 리플 전류 값을 결정하는 데 사용할 수 있습니다. 트랜지스터 스위치 OFF 기간 동안.
위의 논의에서 우리는 벅 인덕터의 전류 (암페어) 계수를 결정하기위한 방정식을 성공적으로 도출했습니다.
전압 결정
이제 벅 인덕터의 전압 계수를 결정하는 데 도움이 될 수있는 표현식을 찾아 보겠습니다.
Δi는 Eq # 1과 Eq # 2 모두에서 공통적이므로 다음을 얻기 위해 항을 서로 동일시 할 수 있습니다.
“노크 센서의 작동 원리 ”
(와인-Vtrans-Vout) Ton / L = (Vout-VD) Toff / L
VinTon – Vtrans – Vout = VoutToff – VDToff
VinTon-Vtrans-VoutTon = VoutToff-VDToff
VoutTon + VoutToff = VDToff + VinTon-VtransTon
Vout = (VDToff + VinTon – VtransTon) / T
위의 식에서 듀티 사이클 D로 Ton / T 식을 대체하면
Vout = (Vin-Vtrans) D + VD (1-D)
위의 방정식을 더 처리하면 다음과 같은 결과를 얻을 수 있습니다.
Vout + VD = (Vin-Vtrans + VD) D
또는
D = Vout-VD / (Vin-Vtrans-VD)
여기서 VD는 다이오드 양단의 전압 강하를 나타냅니다.
스텝 다운 전압 계산
트랜지스터와 다이오드의 전압 강하를 무시하면 (입력 전압에 비해 매우 사소 할 수 있기 때문에) 아래와 같이 위의 식을 줄일 수 있습니다.
Vout = DVin
위의 최종 방정식은 벅 컨버터 회로를 설계하는 동안 특정 인덕터에서 의도 할 수있는 강압 전압을 계산하는 데 사용할 수 있습니다.
위의 방정식은 이전 기사의 해결 된 예에서 논의 된 것과 동일합니다. 벅 컨버터 작동 원리 .
다음 기사에서는 벅 인덕터의 턴 수를 추정하는 방법에 대해 알아볼 것입니다.
Previous : 벅 컨버터 작동 방식 다음 : 고 와트 브러시리스 모터 컨트롤러 회로