로봇 소개
로봇은 인간처럼 보이는 기계입니다. 그것은 어떤 일을하도록 프로그래밍되었습니다. 로봇이라는 단어는 슬라브어 robota (강제 노동자를 의미)에서 유래했습니다. 로봇은 1960 년대에 개발되었으며 로봇은 금속과 다른 요소의 혼합으로 만들어졌습니다. 로봇은 명령을 내리고 인간이 말하는 것입니다. 30 년 전 로봇은 공상 과학 영화에 등장했습니다. 그러나 오늘날 로봇 공학은 많은 분야에서 사용됩니다. 그리고 그것은 인류의 미래에 매우 중요합니다. 그만큼 로봇 기술 국방, 의료, 제조, 국토 안보, 교육, 소비재 및 다양한 부문을 지원하도록 개선되었습니다. 이미 의사들은 특수 수술에서 로봇 공학을 사용하고 있습니다. 로봇은 인간이 할 수없는 위험하고 불가능한 작업을 수행하기 때문에 중요합니다.
로봇이 인기를 끌었던 5 가지 이유
- 속도
- 위험한 환경
- 반복적 인 작업
- 능률
- 정확성
속도:
로봇은 작업을 수행하는 사람보다 빠르기 때문에 사용될 수 있습니다. 로봇은 실제로 컴퓨터에 의해 제어되는 메커니즘입니다. 우리는 컴퓨터가 인간에 비해 매우 빠르게 계산하고 데이터를 처리 할 수 있다는 것을 알고 있습니다. 실제로 일부 로봇은 인간보다 빠르게 물건을 집어 넣는 것과 같은 작업을 더 빠르게 수행합니다.
위험한 환경 :
로봇은 인간이 위험한 곳에서 작업 할 수 있기 때문에 위험한 환경으로 사용될 수 있습니다. 예를 들어 로봇은 인간보다 더 많은 양의 열, 복사, 화학 연기를 견디도록 설계 할 수 있습니다.
반복적 인 작업 :
때때로 로봇은 인간보다 훨씬 빠르지 않지만 단순히 동일한 작업을 반복해서 수행하는 데 능숙합니다. 로봇이 작업을 한 번만 수행하도록 프로그래밍되면 동일한 프로그램을 여러 번 실행하여 작업을 여러 번 수행 할 수 있기 때문에 로봇에게는 쉽습니다. 그리고 로봇은 인간처럼 지루하지 않을 것입니다.
능률:
효율성은 낭비없이 작업을 수행하는 것입니다. 이거는
- 시간 낭비하지 않음
- 재료 낭비 없음
- 에너지 낭비하지 않음
정확성:
정확성은 작업을 매우 정확하게 수행하는 것입니다. 공장에서 품목을 제조하는 경우 각 품목은 동일하게 만들어 져야합니다. 품목을 조립할 때 로봇은 몇 분의 1 밀리미터 이내에 부품을 배치 할 수 있습니다.
로봇 제어
기본 로봇 또는 로봇 시스템은 로봇의 전체 회로를 수용하는 강체로 구성됩니다. 회로는 환경의 변화를 감지하고이 정보를 제어 장치에 공급하는 센서로 구성됩니다.
센서의 입력에 따라 제어 장치가 액추에이터를 제어합니다. 따라서 로봇의 주요 작동은 제어 장치에 있습니다. 일부 응용 분야에서 로봇은 완전히 자동입니다. 즉, 제어는 장치 자체 내에 있고 일부 센서 장치를 기반으로 액추에이터는 제어 장치에 의해 자동으로 제어됩니다. 일부 애플리케이션에서는 로봇이 수동으로 제어됩니다.
로봇을 수동으로 제어하는 두 가지 방법을 살펴 보겠습니다.
- 휴대 전화 사용
- TV 리모컨 사용
휴대 전화 제어 로봇 차량 :
우리가 말할 때 무선 로봇 차량 , 우리는 일반적으로 RF 기술 회로에 대해 생각합니다. 하지만이 프로젝트는 매우 다릅니다. 로봇 차량의 움직임을 제어하기 위해 휴대 전화를 사용합니다. 여기에서는 DTMF 기술을 사용하여 휴대폰을 사용하여 로봇 차량을 제어했습니다. 우리는 두 개의 휴대폰을 사용했는데, 하나는 로봇에 연결되고 다른 하나는 사용자 전화입니다. 이 두 휴대폰간에 통신이 설정되고 키를 누르면 해당 톤이 셀의 다른 쪽 끝으로 들립니다. 이 톤을 '듀얼 톤 다중 주파수'톤 (DTMF)이라고합니다.

휴대 전화 제어 로봇 차량

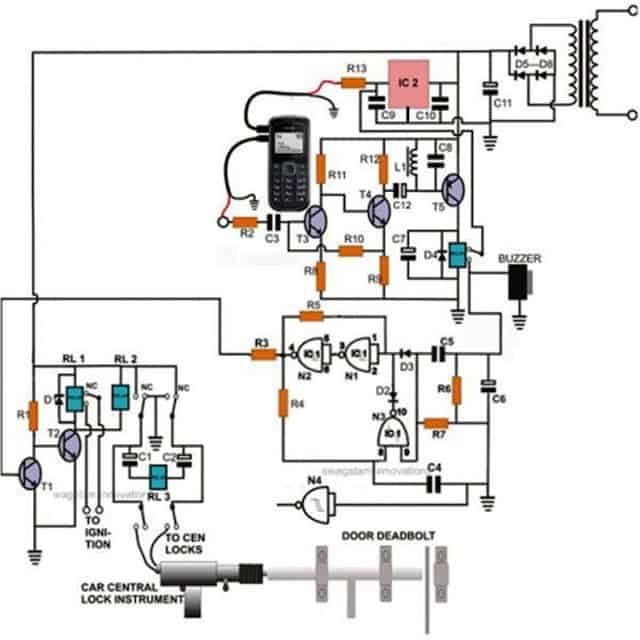
휴대 전화 제어 로봇 차량 회로도
이 프로젝트는 로봇 차량 그것은 휴대폰으로 제어됩니다. 이것은 8051 마이크로 컨트롤러를 기반으로합니다. 두 개의 휴대폰은 요구 사항에 따라 로봇을 제어합니다. 하나의 휴대폰은 로봇에 연결되고 다른 하나는 사용자 셀입니다. 사용자 휴대폰에서 키를 누르면 해당 키가 해당 톤을 생성하면 다른 셀에서 수신됩니다. 수신 된 톤은 DTMF 디코더의 도움으로 마이크로 컨트롤러에 의해 처리됩니다. 디코더는 DTMF 톤을 이진 숫자로 디코딩하고이 이진 코드 데이터는 마이크로 컨트롤러로 전송됩니다. 휴대 전화의 입력을 기반으로 마이크로 컨트롤러는 모터 드라이버에 적절한 신호를 제공하여 각 모터를 원하는 방향으로 회전시킵니다. 예를 들어 사용자 휴대폰에서 특정 번호를 누르면 자동으로 시스템 휴대폰으로 전화가 걸립니다. 시스템 모바일은 그에 따라 톤을 디코딩하는 DTMF 디코더에 연결되고 모터는 누른 번호에 해당하는 방향으로 회전합니다.
IR 제어 로봇 차량 :
이 시스템에서 주로 로봇 차량은 TV 리모컨으로 제어됩니다. 적외선 (IR) 센서는 원격 신호를 감지하기 위해 로봇 제어 장치에 연결됩니다. 이 정보는 요구 사항에 따라 로봇을 이동하는 제어 장치로 전달됩니다. 마이크로 컨트롤러는 제어 시스템으로 활용됩니다.
이 IR 리모컨은 송신기 역할을합니다. 리모컨에서 버튼을 눌렀을 때 신호는 IR 수신기에 의해 전달되고 획득됩니다. 이 기호는 신호를 디코딩하고 리모컨에서 눌린 버튼에 따라 관련 동작을 수행하는 마이크로 컨트롤러로 전송됩니다. 예를 들어, 리모컨에서 1 번을 누르면 로봇은 우리의 요구 사항에 따라 왼쪽으로 돌아갑니다. 다른 사업 테스트 (앞, 뒤, 오른쪽)는 IR을 활용 한 비교 방식으로 수행됩니다. 수신 측에서 마이크로 컨트롤러에 연결된 두 개의 모터에 의해 개발이 이루어집니다.
프로그램이 작성됩니다. 즉, 실행되는 동안 위에서 설명한대로 로봇의 이동을 위해 모터를 실행하기위한 요구 사항에 따라 모터 드라이버 IC에 명령을 보냅니다.

IR 제어 로봇 차량 블록 다이어그램
이 기사에 대해 의문이 있으면 의견을 남겨주세요. 그리고 이와 관련된 더 많은 응용 프로그램과 방법을 알려주십시오.