이 프로젝트에서는 555 타이머 IC를 사용하여 간단한 단극 스테퍼 모터 드라이버 회로를 만드는 방법을 배웁니다. 555 타이머 외에도 10 년 카운터 IC 인 IC CD 4017이 필요합니다.
작성자 : Ankit Negi
특정 작업을 수행하기 위해 모든 단극 모터를이 회로에 연결할 수 있지만, 먼저 약간의 변경이 필요합니다.
스테퍼 모터의 속도는 방전과 임계 값 사이에 연결된 전위차계에서 제어 할 수 있습니다. 555 타이머의 핀 .
스테퍼 모터 기초
스테퍼 모터는 일반 DC 모터로는 달성 할 수없는 특정 회전 량이 필요한 영역에서 사용됩니다. 스테퍼 모터의 일반적인 응용 분야는 3D 프린터입니다. 인기있는 스테퍼 모터에는 UNIPOLAR와 BIPOLAR의 두 가지 유형이 있습니다.
이름에서 알 수 있듯이 단극 스테퍼 모터에는 하나씩 쉽게 전원을 공급할 수있는 공통 와이어가있는 권선이 포함되어 있습니다.
바이폴라 스테퍼 모터는 코일 사이에 공통 단자가 없기 때문에 제안 된 회로를 사용하여 간단히 구동 할 수 없습니다. 바이폴라 스테퍼 모터를 구동하려면 h- 브리지 회로가 필요합니다.
구성 요소 :
1. 555 타이머 IC

두. CD 4017 IC

3. 저항기 4.7K, 1K


4. 포텐시오 미터 220K

5. 커패시터 1 개

6. 4 개의 다이오드 1N4007

7. 4 개의 트랜지스터 2N2222

8. 단극 스테퍼 모터

9. DC 전원
555 타이머의 목적 :
스테퍼 모터의 속도를 결정하는 특정 주파수 (220k 포트를 사용하여 변경 가능)의 클록 펄스를 생성하려면 555 타이머가 필요합니다.
IC 555 핀아웃 세부 사항

CD4017의 목적 :
위에서 이미 언급했듯이 10 진 카운터 IC입니다. 즉, 최대 10 개의 클럭 펄스를 카운트 할 수 있습니다. 이 IC를 특별하게 만드는 것은 자체 디코더가 내장되어 있다는 것입니다. 따라서 이진수를 디코딩하기 위해 추가 IC를 추가 할 필요가 없습니다.
4017은 최대 10 클럭 펄스를 계산합니다. 555 시간 10 개의 출력 핀에서 하나씩 각 클럭 펄스에 해당하는 높은 출력을 제공합니다. 한 번에 하나의 핀만 높습니다.
트랜지스터의 목적 :
여기에 트랜지스터의 두 가지 목적이 있습니다.
1. 트랜지스터는 여기서 스위치처럼 작동하여 한 번에 하나의 코일에 전원을 공급합니다.
2. 트랜지스터는 고전류가 통과 한 후 모터를 통과하게하여 매우 적은 양의 전류를 공급할 수 있으므로 555 타이머를 완전히 배제합니다.
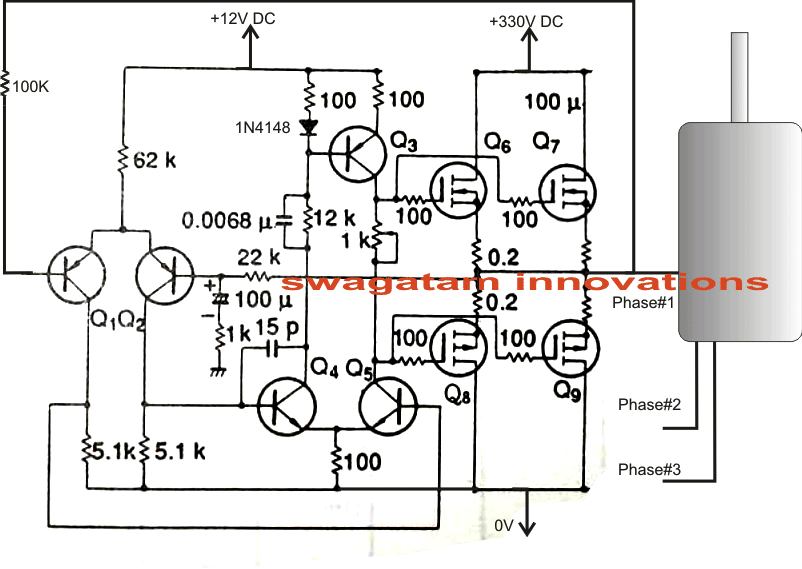
회로도 :

그림과 같이 연결하십시오.
1. 핀 3 또는 555 타이머의 출력 핀을 IC 4017의 핀 14 (클럭 핀)에 연결합니다.
2. 활성화 핀 또는 4017의 13 번째 핀을 접지에 연결합니다.
3. 핀 3,2,4,7을 트랜지스터 1,2,3,4에 하나씩 연결합니다.
4. 1k 저항을 통해 10 번 및 15 번 핀을 접지에 연결합니다.
5. 스테퍼 모터의 공통 와이어를 전원의 양극에 연결합니다.
6. 스테퍼 모터의 다른 전선을 코일에 하나씩 통전시켜 1 회전을 적절히 완료 할 수 있도록 연결합니다. (제조업체에서 제공하는 모터의 데이터 시트를 참조 할 수 있습니다.)
IC 4017의 출력 PIN 10이 PIN 15 (RESET PIN)에 연결된 이유는 무엇입니까?
위에서 이미 언급했듯이 4017은 클럭 펄스를 최대 10 번째 클럭 펄스까지 하나씩 카운트하고 그에 따라 출력 핀에 높은 출력을 제공하며 각 출력 핀은 하이가됩니다.
이로 인해 불필요한 모터 회전 지연이 발생합니다. 모터의 완전한 회전을 위해 처음 4 개의 핀만 필요하거나 o에서 3까지의 처음 4 개의 십진수 카운트 만 필요하므로 핀 번호. 10 번 핀은 15 번 핀에 연결되어 4 번째 카운트 IC가 리셋되고 처음부터 카운트를 시작합니다. 이렇게하면 모터의 회전이 중단되지 않습니다.
일:
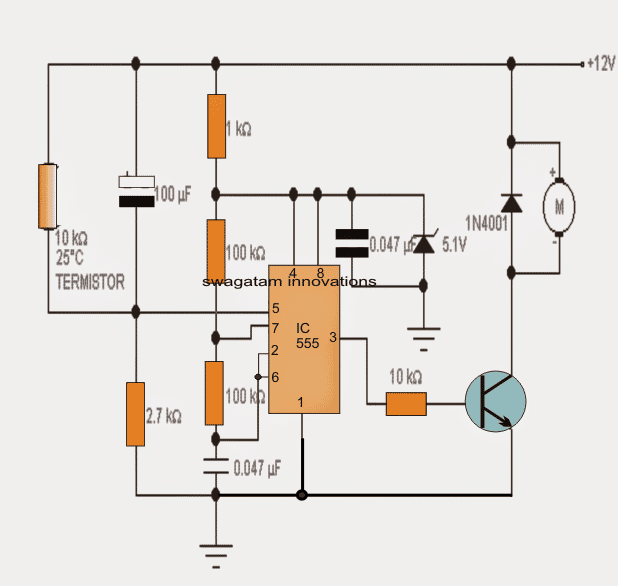
제대로 연결 한 후 회로를 켜면 모터가 단계적으로 회전하기 시작합니다. 555 타이머는 저항, 전위차계 및 커패시터의 값에 따라 클록 펄스를 생성합니다.
이 세 가지 구성 요소 중 하나의 값을 변경하면 클럭 펄스의 주파수가 변경됩니다.
이 클럭 펄스는 IC CD 4017에 주어지며, 그 다음 클럭 펄스를 하나씩 계수하고 3,2,4,7 번 핀에 각각 출력으로 1을 제공하고이 프로세스를 계속 반복합니다.
트랜지스터 Q1이 핀 3에 연결되어 있기 때문에 먼저 트랜지스터 Q2, Q3 및 Q4가 차례로 켜집니다. 그러나 한 트랜지스터가 켜져 있으면 다른 모든 트랜지스터는 꺼져 있습니다.
Q1이 켜져 있으면 닫힌 스위치처럼 작동하고 전류는 공통 와이어를 통해 와이어 1로 흐른 다음 트랜지스터 Q1을 통해 접지됩니다.
이것은 코일 1에 전원을 공급하고 모터는 클럭 주파수에 따라 어떤 각도로 회전합니다. 그러면 코일 2 다음에 코일 3과 코일 4에 전원을 공급하는 Q2에서도 동일한 일이 발생합니다. 따라서 하나의 완전한 회전이 얻어집니다.
전위차계가 회전 할 때 :
팟의 초기 위치가 방전과 임계 값 핀 사이에 최대 저항 (220k)이있는 위치라고 가정 해 보겠습니다. 출력 클럭 펄스의 주파수 공식은 다음과 같습니다.
F = 1.44 / (R1 + 2R2) C1
공식에서 R2 값이 증가함에 따라 클럭 펄스의 주파수가 감소한다는 것이 분명합니다. 따라서 R2 또는 pot의 값이 최대 일 때 주파수는 최소가되는데 이는 IC 4017이 더 느리게 계산되고 더 많은 지연된 출력을 제공하기 때문입니다.
저항 R2의 값이 감소하면 주파수가 증가하여 IC 4017의 출력 간 지연이 최소화됩니다. 따라서 스테퍼 모터가 더 빠르게 회전합니다.
따라서 전위차계의 값은 스테퍼 모터의 속도를 결정합니다.
시뮬레이션 비디오 :
여기서 모터의 속도가 저항 R2에 따라 어떻게 변하는 지 명확하게 볼 수 있습니다. 그 값은 먼저 감소한 다음 증가하고 차례로 증가한 다음 스테퍼 모터의 속도가 감소합니다.
이전 : 크랭크 손전등 작동 원리 다음 : 정확한 판독을위한 Arduino 타코미터 회로