기사의이 부분에서 우리는 전기 자동차의 페달 프레스 메커니즘을 이에 상응하는 변화하는 전기 신호로 변환하는 혁신적인 방법에 대해 배웁니다. 이는 차량의 속도 제어를 처리하는 데 더 사용될 수 있습니다.
설명 된 개념은 PWM 기술을 사용하여 페달을 서서히 밟을 때 차량 속도를 선형 적으로 증가시키는 전자 가속기처럼 작동하며 그 반대의 경우도 마찬가지입니다.
이 아이디어는 Mr. Lokesh Maini가 요청했습니다.
기술 사양
저는 기계적인 사람으로 현재 전기 자동차에서 일하고 있으며 페달을 사용하여 모터의 속도를 제어하고 싶습니다. 나는 내 모터 컨트롤러를 얻지 못하고 있습니다.
감사하다
모터 사양은 36volt, 43amps 및 1.5hp 브러시 드 DC 모터입니다.
기계 설계
페달 가속기의 전자 버전은 먼저 페달을 기계적으로 누르는 것을 이에 상응하는 변화하는 전기 신호로 변환하는 메커니즘이 필요하므로,이 신호는 원하는 변환을 위해 신호 프로세서 단계를 통해 처리 될 수 있습니다. 차량.
피에조 부하 센서, 용량 성 부하 센서, 공명 센서 등을 사용하여 많은 개념을 시도 할 수 있습니다.이 기사에서는 동일한 작업을 수행하기 위해 LED / LDR 어셈블리를 통합하는 훨씬 더 간단한 방법을 배웁니다. .

위의 그림에 표시된 전기 기계 배열에서 다음과 같은 통합 구성 요소를 볼 수 있습니다.
나사 메커니즘으로 부착 된 작은 기어.
흰색 매트 반사판 표면이있는 나사 머리
나사 머리 앞에 위치한 LED / LDR 어셈블리.
제안 된 메커니즘의 작동 방식.
위 그림에 표시된 기어는이 기어보다 10 배 더 높은 비율을 가진 다른 기어로 고정되어야합니다.
더 큰 기어는 페달을 밟으면 회전 운동을 시작하도록 페달 메커니즘으로 구성해야합니다.
기어의 회전 응답은 LED / LDR 어셈블리가있는 챔버를 가로 질러 나사 헤드의 전진 동작을 생성합니다.
이 프로세스는 LED에서 반사 된 빛의 양을 비례 적으로 변화시켜 LDR에 수신합니다.
페달 눌림에 대응하는 이러한 가변 데이터 (변하는 저항의 형태)는 특정 차량의 의도 된 속도 제어를 강화하기 위해 신호 프로세서 회로에 공급 될 수 있습니다.
에서 다음 게시물 PWM 기술을 사용하여 신호 프로세서 단계를 배웁니다.
에서 위 섹션 우리는 페달 동작을 비례 적으로 변화하는 전기 신호로 변환하기위한 간단한 전기 기계식 변환기 어셈블리에 대해 배웠습니다.
페달 동작을 PWM으로 변환
이제 차량의 의도 된 모터 속도 제어를 위해 페달 전기 신호를 상응하는 가변 PWM 신호로 변환 할 수있는 회로 구현을 연구 해 보겠습니다.

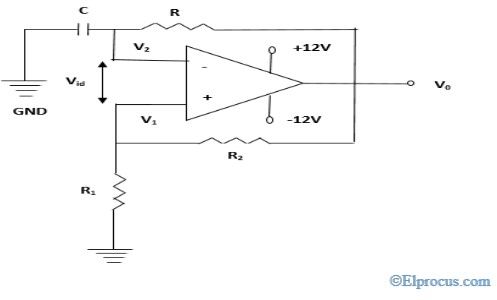
위의 회로도를 참조하면 다음 사항을 통해 회로 작동을 평가할 수 있습니다.
IC1은 최대 ON 시간과 최소 OFF 시간을 듀티 사이클로 갖는 80Hz 펄스 발생기로 구성됩니다.
IC2는 먼저 핀 2에 적용된 80Hz 이상의 펄스를 핀 6에서 생성 된 삼각파로 변환하고 삼각파를 핀 5에서 사용 가능한 변조 전압과 비교하는 비교기로 조작됩니다.
pin5 변조 전압은 페달 동작에서 얻은 LDR 입력과베이스가 연결된 공통 컬렉터로 구성된 BJT BC547 이미 터에서 파생됩니다.
페달 누름에 따른 다양한 저항은 100K 사전 설정과 비교되며 트랜지스터의베이스에서 전압의 비례 크기가 발생하여 IC2의 5 번 핀을 통해 저 전류 입력을 동등한 고전류 신호로 변환합니다.
이 순간 전위 레벨은 MOSFET 및 연결된 모터에 대해 비례적인 크기의 PWM 신호를 생성하는 IC2에 의해 수용되고 처리됩니다.
따라서 모터 속도는 차량의 페달 밟음에 따라 변동하는 PWM에 따라 제어되고 변경됩니다.
위의 절차는 페달 동작을 차량 모터 및 속도의 제어 된 작동으로 효과적으로 변환합니다.
“건전지는 무엇입니까 ”
회로 설정 방법.
이것은 정말 쉽습니다.
- 나사 머리가 LED / LDR 어셈블리 앞의 가능한 가장 가까운 위치에 도달하도록 페달을 최대 지점까지 누르십시오.
- 다음으로 IC2의 pin3이 최대 폭으로 PWM을 생성하기 시작할 때까지 100k 프리셋을 조정합니다. 이는 pin3의 전압을 회로의 공급 전압 인 5V에 최대한 가깝게 측정하여 확인할 수 있습니다.
- 이 작업이 완료되면 설정 절차가 완료된 것으로 간주 할 수 있습니다.
- 결과는 이제 다른 수준에서 페달을 밟고 동일한 방식으로 모터 속도가 다른지 확인하여 확인할 수 있습니다.
이전 : 간단한 ESR 미터 회로 다음 : 성장 조명 회로를 구축하는 방법