현대 사회에서 로봇은 중요한 역할을 할 것입니다 . 로봇의 주된 목적은 인력을 줄이는 것입니다. 로봇은 많은 응용 분야에서 전자 제품에 사용됩니다. 이 기사에서는 Arduino 모듈 및 8051 마이크로 컨트롤러로 로봇을 구축하는 방법에 대해 논의했습니다. Arduino로 로봇을 만들기 위해 장애물 회피 기능이있는 arduino 로봇에 대해 설명합니다. 필요한 구성 요소에는 로봇 본체, DC 모터, 초음파 센서, Arduino 모듈, 모터 드라이버 IC 및 Arduino 모듈이 포함됩니다.
로봇을 만드는 방법?
그만큼 필수 구성 요소 로봇을 만드는 데는 다음이 포함됩니다.
로봇 본체
기본 로봇 본체 장애물 회피 로봇 다음 이미지에 표시됩니다. 로봇 본체는 플라스틱 본체이며 양쪽에 바퀴가 있습니다. 로봇 본체 앞에 초음파 센서가 배치되어 있습니다. 초음파 센서를 사용하여 장애물을 감지 할 수 있습니다. 로봇이 움직일 때 초음파 센서에 장애물이 감지되면 로봇은 옆으로 움직이고 계속 움직입니다.

로봇 본체
DC 모터
그만큼 DC 모터는 전기 모터입니다. 그리고 그것은 직류 전기로 작동합니다. 전기 모터의 작동은 전자기를 기반으로합니다. 자기장은 외부 자기장에 배치 될 때 전류 운반 도체에 의해 생성되며, 도체의 전류에 비례하는 힘을 경험하게됩니다. 극성은 북쪽에서 북쪽으로 & 남쪽에서 남쪽으로 같으면 자석이 밀어 낼 것입니다.

DC 모터
DC 모터의 내부 구성은 전류 전달 도체와 외부 자기장 사이의 자기 상호 작용을 연결하여 동작을 생성하도록 설계되었습니다. 여기서는 두 개의 DC 모터를 사용하고 있으며 각 모터에는 6v가 포함되어 있고 총 두 개의 DC 모터에는 12v가 포함되어 있습니다. 두 개의 DC 모터는 다음 이미지에서 볼 수있는 로봇 본체에 배치됩니다. 로봇 본체는 DC 모터의 도움으로 이동합니다.

DC 모터가있는 로봇 본체
Arduino 모듈
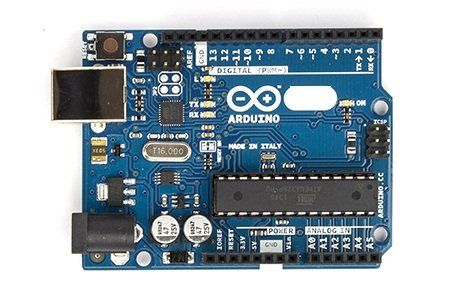
다음 이미지는 arduino 모듈 이미지를 보여줍니다. 그만큼 arduino 모듈 arduino 키트를 사용한 장애물 회피 로봇 설계에 중요한 역할을합니다. arduino의 수신기 핀은 초음파 센서의 두 번째 핀에 연결되고 arduino 모듈의 1, 2, 3 핀은 DC 모터 드라이버에 연결됩니다. 공통 구성 요소 커패시터 및 다이오드는 배터리 전원 공급 장치의 도움으로 arduino 모듈에도 연결됩니다.

Arduino 모듈
모터 드라이버 IC
DC 모터를 실행하려면 모터 드라이버 IC 익숙한. 모터 드라이버의 핀 3,6, 11, 14는 DC 모터에 연결됩니다. 입력 핀 1과 2는 arduino 모듈에 연결되고 활성화 핀은 arduino의 송신기 핀에 연결됩니다. 모터 드라이버의 핀 4, 5, 12, 13은 접지에 연결됩니다.

모터 드라이버 IC
초음파 센서
이 개념에서 초음파 센서 전방의 장애물을 감지하는 데 사용되며 arduino 보드에 명령을 보냅니다. 입력 신호에 따라 마이크로 컨트롤러는 로봇을 다른 방향으로 이동하도록 리디렉션합니다.

초음파 센서
arduino 로봇 장애물 회피의 응용
- arduino 로봇은 모든 표면에서 움직일 수 있습니다.
- 냉장고 본체와 같은 금속 표면에서 움직일 수 있습니다.
아래 이미지는 장애물 회피를위한 arduino 로봇을 보여줍니다.

장애물 회피를위한 Arduino 로봇
로봇을 만들려면 8051 마이크로 컨트롤러 금속 탐지기 로봇 차량에 대해 설명하고 있습니다. 8051 마이크로 컨트롤러로 로봇을 구축하는 데 필요한 구성 요소는 다음과 같습니다.
- 8051 마이크로 컨트롤러
- DC 모터
- 모터 드라이버
- 금속 탐지기
- 디코더
- 인코더
- 푸시 버튼
- 결정
- RF 송신기 및 수신기
금속 탐지기
그만큼 금속 탐지기 코일은 지상의 금속을 감지하는 데 사용되는 하나 이상의 금속 코일이 있습니다. 금속 탐지기는 전자기 유도 원리에 따라 작동합니다. 금속 탐지기는 마지막 이미지에서 관찰 할 수있는 PCB를 통해 로봇 본체에 연결됩니다. 다음 이미지는 전자 프로젝트에 사용되는 일반적인 금속 탐지기를 보여줍니다.

금속 탐지기
푸시 버튼
푸시 버튼은 플라스틱 및 금속과 같은 단단한 금속으로 만들어진 버튼입니다. 일반적으로 푸시 버튼은 마이크로 컨트롤러에서 프로그램을 재설정하는 데 사용됩니다. 다음 이미지는 누름 버튼 이미지를 보여줍니다.

누름 단추
8051 마이크로 컨트롤러
그만큼 8051 마이크로 컨트롤러는 40 핀으로 구성됩니다. . 마이크로 컨트롤러의 4 번째 및 5 번째 핀은 수정 발진기에 연결됩니다. Vcc 핀은 5V의 전원 공급 장치에 제공되고 접지 핀은 접지에 연결됩니다. 마이크로 컨트롤러의 핀 15, 16, 18, 19는 HT12E의 인코더 IC에 연결됩니다. 마이크로 컨트롤러 핀 2, 7, 8, 9는 푸시 버튼에 연결됩니다.
저항, 커패시터, 수정 발진기, 8051 시리즈 마이크로 컨트롤러, 인코더 등과 같은 모든 구성 요소를 연결 한 후 다음 이미지가 켜져 있습니다. 인쇄 회로 기판 .

PCB 연결
아래 이미지는 8051 시리즈 마이크로 컨트롤러가있는 금속 탐지기 로봇을 보여줍니다.

8051 시리즈 마이크로 컨트롤러가있는 금속 탐지기 로봇
이 기사에서 우리는 arduino 및 8051 마이크로 컨트롤러로 로봇을 만드는 방법 . 이 기사를 읽고 로봇을 만드는 데 필요한 기본 지식을 얻었 으면합니다. 이 기사 또는 전자 제품에 대한 질문이있는 경우 커뮤니케이션 프로젝트 , 아래 섹션에 자유롭게 의견을 남겨주세요. 여기에 질문이 있습니다. 8051 시리즈 마이크로 컨트롤러 란 무엇입니까?
.