이 기사에서는 Arduino 및 16x2 LCD를 사용하여 초음파 거리 측정기 회로를 구성 할 것입니다. 또한 초음파 모듈이 무엇인지, 어떻게 작동하는지, 거리를 측정하는 데 어떻게 사용할 수 있는지 살펴 보겠습니다.
초음파 란?
평균적으로 건강한 사람은 20Hz에서 20,000Hz 범위의 주파수를들을 수 있습니다. 20,000Hz 또는 20KHz 이상의 사람의 귀는 이러한 주파수를 감지 할 수 없습니다. 20KHz보다 큰 음향 공명을 초음파 20Hz 미만의 음향 공진을 초 저주파라고합니다.
고양이 나 개와 같은 대부분의 가축은 인간보다 더 넓은 범위의 음향 주파수를들을 수 있습니다. 우리의 일부 전자 장치 초음파가 전자 제품에 사용되는 이유입니다. 모기 구충제 그리고 또한 개 구충제.
그러나 박쥐와 같은 많은 야생 동물은 초음파를 이용하여 포식자와 먹이 사이의 거리를 결정하는 데 도움이됩니다. 그것은 초음파를 방출하고 수신하여 거리를 계산하는 생물학적 센서를 가지고 있습니다.
이 원칙은 많은 현대 전자 측정 장비 현재 프로젝트에도 동일한 원리를 적용 할 수있는 방법을 배웁니다.
초음파 센서 :
우리는 전자 상거래 사이트 및 전자 소매점에서 매우 인기 있고 일반적으로 사용할 수있는 특수 전자 장치 초음파 트랜시버 모듈 HC-SR04를 사용할 것입니다.
4 핀 Vcc, 접지, 트리거 및 에코로 구성됩니다. 이 핀은 arduino 마이크로 컨트롤러와 인터페이스됩니다.
그것은 송신기 및 수신기 모듈 똑같이 보이며 송신기와 수신기의 입구에서 알루미늄 실린더와 메시로 보호됩니다. 이 모듈은 또한 에코 신호를 디코딩하는 마이크로 컨트롤러로 구성됩니다.
거리를 측정하려면 일련의 초음파 버스트를 보내고 에코를 들어야합니다. 이를 위해 10 마이크로 초 동안 트리거 핀을 높게 유지해야하며 송신기는 8 개의 초음파 버스트 펄스를 보냅니다.
수신기 모듈은 장애물에 부딪힌 후 이러한 버스트를 수신합니다. 에코 핀은 거리에 비례하여 높은 신호를 내 보냅니다. Arduino는 전송 및 수신 신호의 시간을 해석하여 실제 거리를 결정합니다.
소리는 공중에서 340m / s로 이동하고 전송 및 수신 신호를 비교하여 시간을 결정할 수 있으므로 속도-거리 공식을 사용하여 거리를 결정할 수 있습니다.
거리 = 속도 엑스 시각
이 값은 Arduino에 의해 계산되고 LCD 디스플레이에 적절한 값을 인쇄합니다. 제안 된 초음파 거리 측정기 회로는 미터뿐만 아니라 센티미터 단위로 거리를 표시 할 수 있습니다.
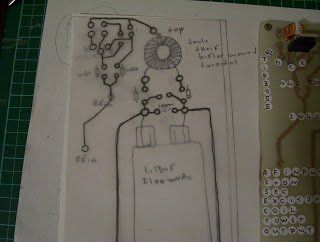
저자의 프로토 타입 :

회로도 :

초음파 거리 측정기 회로 연결은 표준 arduino-LCD 인터페이스를 통해 이루어지며 다른 유사한 arduino-LCD 기반 프로젝트에서도 찾을 수 있습니다. 전위차계는 LCD 디스플레이의 대비를 조정하는 데 사용됩니다.
그만큼 초음파 센서 A0에서 A3까지 저자의 프로토 타입에 표시된대로 아날로그 핀에 직접 삽입 할 수 있습니다. 센서가 바깥 쪽을 향하면 위의 회로를 복제하면서 와이어 혼잡을 줄일 수 있습니다.
프로그램 코드 :
#include LiquidCrystal lcd(12,11,5,4,3,2) const int trigger = A1 const int echo = A2 int vcc = A0 int gnd = A3 long Time float distanceCM float distanceM float resultCM float resultM void setup() { lcd.begin(16,2) pinMode(trigger,OUTPUT) pinMode(echo,INPUT) pinMode(vcc,OUTPUT) pinMode(gnd,OUTPUT) } void loop() { digitalWrite(vcc,HIGH) digitalWrite(gnd,LOW) digitalWrite(trigger,LOW) delay(1) digitalWrite(trigger,HIGH) delayMicroseconds(10) digitalWrite(trigger,LOW) Time=pulseIn(echo,HIGH) distanceCM=Time*0.034 resultCM=distanceCM/2 resultM=resultCM/100 lcd.setCursor(0,0) lcd.print('Distance:') lcd.print(resultM) lcd.print('M') lcd.setCursor(0,1) lcd.print('Distance:') lcd.print(resultCM) lcd.print('cm') delay(1000) } 이전 : 전동 차양 회로 다음 : TDA1011을 사용하는 6 와트 오디오 증폭기 회로